Джойстик для ардуино подключение. Делаем еще один джойстик (геймпад) на Arduino
В один прекрасный день попался мне на eBay интереснейший маленький модуль джойстика, который очень похож на используемые в контроллерах для PlayStation 2. Оказалось, что модуль очень прост в использовании с Arduino и стоит буквально несколько долларов.
Компаний-производителей джойстиков для Arduino несколько, в том числе Adafruit, Sparkfun и огромное количество китайских фирм. Радует, что принцип действия у них совершенно идентичный.
Общая информация о модуле джойстика для Arduino
На модуле 5 пинов: Vcc, Ground, X, Y, Key. Обратите внимание, что обозначения на вашем модуле могут отличаться. Это зависит от производителя. Джойстик аналоговый и обеспечивает более высокую точность, чем простые "directional" джойстики, в которых используются кнопки и механические переключатели. Кроме того, на джойстик можно нажать (на моей модели прилагать для этого приличные усилия. Возможно, он просто еще не разработан). После нажатия отработает кнопка "press to select".
Для считывания данных с пинов X/Y надо использовать аналоговые выходы на Arduino. Пин Key замыкается землей при нажатии. В противоположном случае ни в какой цепи он не участвует. Для стабильного считывания данных с пинов Key/Select, они должны подключаться к источнику питания (Vcc) через подтягивающий резистор. Номинала встроенных на Arduino резисторов для этого будет вполне достаточно.
Посмотрите видео-пример работы джойстика с Arduino:
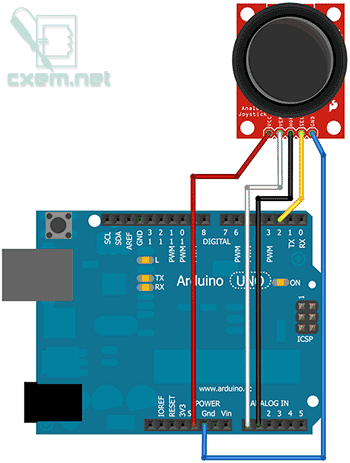
Схема подключения джойстика к Arduino
Arduino GND - GNG
ARDUINO A0 - VER/Y
Arduino A1 - HOR/X
Базовый скетч для использования джойстика с Arduino
int buttonPin = 2;
int xPosition = 0;
int yPosition = 0;
int buttonState = 0;
// инициализация обмена данными по серийному протоколу со скоростью 9600 bps:
Serial.begin(9600);
pinMode(xPin, INPUT);
pinMode(yPin, INPUT);
// активируем подтягивающий резистор на пине кнопки
pinMode(buttonPin, INPUT_PULLUP);
// Для более ранних версий Arduino (меньше 1.0.1)
// pinMode(buttonPin, INPUT);
// digitalWrite(buttonPin, HIGH);
xPosition = analogRead(xPin);
yPosition = analogRead(yPin);
buttonState = digitalRead(buttonPin);
Serial.print("X: ");
Serial.print(xPosition);
Serial.print(" | Y: ");
Serial.print(yPosition);
Serial.print(" | Button: ");
Serial.println(buttonState);
delay(100); // добавляем задержку между считыванием данных
Как уже упоминалось выше, модули джойстика производят многие. Интересное решение есть у компании Sparkfun. Они выпускают шилд Joystick Shield, о котором мы дальше и поговорим. Внешний вид джойстик шилда представлен на рисунке ниже.

Сборка джойстик шилда
Здесь стоит упомянуть, что шилд поставляется в разобранном виде. Так что придется поработать паяльником. Полная инструкция по сборке находится по этому адресу: Joystick Shield Assembly Guide . Материал от производителя на английском языке, но фотоматериалов вполне достаточно. Так что разобраться несложно.
Для чего можно использовать джойстик?
На джойстик шилде установлено четыре кнопки справа, одна кнопка непосредственно на джойстике ну и сам аналоговый джойстик. Шилд можно использовать для управления мелодией или пикселями на мониторе. Кнопки можно использовать для навигации и управления в играх.
Для дополнительной мотивации можете заценить видео ниже:
После того, как вы собрали ваш джойстик шилд, можете смело вносить изменения в скетчи для реализации ваших задач.
Как отследить текущее положение джойстика?
Положение джойстика рассчитывается в зависимости от значений двух потенциометров , которые в нем установлены. Джойстик перемещается в двух направлениях, которые обычно обозначают как X и Y. Для считывания данных с потенциометров используем функцию analogRead(), которая возвращает значение в диапазоне от 0 до 1023. Для этого надо в функцию передать номера пинов, к которым подключен джойстик. В данном примере мы подключаемся к аналоговому пину 0 для X и к аналоговому пину 1 для Y.
Serial.println(analogRead(0)); // отображает текущее положение X координаты
Serial.println(analogRead(1)); // отображает текущее положение Y координаты
Очень удобный подход - использование констант для значений, которые не будут меняться на протяжении работы программы. Так что в коде ниже мы объявим константы для аналоговых пинов, которые мы используем и отобразим текущее положение по Х и Y в серийном мониторе Arduino IDE:
const byte PIN_ANALOG_X = 0;
const byte PIN_ANALOG_Y = 1;
Serial.begin(9600);
Serial.print("x:");
Serial.print(" ");
Serial.print("y:");
Serial.print(" ");
Serial.println();
Как отследить текущее направление джойстика?
Очень полезный кусок кода. На основании значений положений X и Y мы можем определить, находится ли джойстик по центу или он смещен в одном из восьми направлений (вверх, вправо-вверх, вправо, вправо-вниз, вниз, влево-вниз, влево, влево-вверх).
Так как значения в каждом из направлений будет в диапазоне от 0 до 1023, можно предположить, что центр будет находиться в диапазоне 511-512. Но это не совсем так. Настолько точно текущее значение мы не получим. И если мы определим неверное значение, можем получить информацию о движении джойстика, хотя он стоял по центру и не двигался.
Для этого мы введем диапазон значений и будем считать, что любое значение в этом диапазоне будет считаться центром:
Этот диапазон не является «истиной последней инстанции». Вам надо его подстроить под ваш джойстик, так. Эти значения вводятся в код в виде констант:
Теперь мы преобразуем каждую координату из диапазона от 0 до 1023 в диапазон от -1 до 1. Для координаты Х – 1 значит перемещение влево, 0 означает отсутствие перемещения, а 1 – перемещение вправо. Для направления Y -1 означает перемещение вниз, 0 означает отсутствие перемещения, а 1 – перемещение вверх.
Мы начнем с установки значения в каждом направлении 0 («центр»). После этого мы используем выражения if/else для проверки, принимает ли значение положения в любом из направлений большее или меньшее значение чем наш диапазон:
x_direction = 0;
y_direction = 0;
if (x_position > X_THRESHOLD_HIGH) {
x_direction = 1;
} else if (x_position
x_direction = -1;
if (y_position > Y_THRESHOLD_HIGH) {
y_direction = 1;
} else if (y_position
y_direction = -1;
В Arduino IDE есть функция map(), которую, теоретически могли бы использовать вместо if/else, но в данном случае метод усложняется из-за вопросов центрирования, так что применять здесь map мы не будем.
В примере, который представлен ниже, вы увидите, что в дальнейшем if/else используются для отображения направления – вы можете спокойно изменить этот пример под ваши задачи:
const byte PIN_ANALOG_X = 0;
const byte PIN_ANALOG_Y = 1;
const int X_THRESHOLD_LOW = 505;
const int X_THRESHOLD_HIGH = 515;
const int Y_THRESHOLD_LOW = 500;
const int Y_THRESHOLD_HIGH = 510;
int x_direction;
int y_direction;
Serial.begin(9600);
x_direction = 0;
y_direction = 0;
x_position = analogRead(PIN_ANALOG_X);
y_position = analogRead(PIN_ANALOG_Y);
if (x_position > X_THRESHOLD_HIGH) {
x_direction = 1;
} else if (x_position
x_direction = -1;
if (y_position > Y_THRESHOLD_HIGH) {
y_direction = 1;
} else if (y_position
y_direction = -1;
if (x_direction == -1) {
if (y_direction == -1) {
Serial.println("left-down");
Serial.println("left");
// y_direction == 1
Serial.println("left-up");
} else if (x_direction == 0) {
if (y_direction == -1) {
Serial.println("down");
} else if (y_direction == 0) {
Serial.println("centered");
// y_direction == 1
Serial.println("up");
// x_direction == 1
if (y_direction == -1) {
Serial.println("right-down");
} else if (y_direction == 0) {
Serial.println("right");
// y_direction == 1
Serial.println("right-up");
Как настроить Arduino для отслеживания состояния кнопки (нажата ли она)?
Перед тем как узнать, нажата ли кнопка на джойстик шилде, вам надо настроить Arduino на узнавание кнопок. Как это не удивительно, это реализуется в теле функции setup()!
Сначала мы определяем константы для пинов Arduino, которые связаны с кнопками:
// Выбор кнопки, которая срабатывает при нажатии джойстика
const byte PIN_BUTTON_UP = 4;
Если вы до этого когда-то использовали кнопки с Arduino, вы могли заметить, что для определения напряжения при нажатой кнопке, надо использовать резистор . Для уменьшения количества деталей, джойстик шилд спроектирован таким образом, что резисторы не нужны. Вы можете спросить себя: «Если для кнопок нужны резисторы, почему шилд работает без них?». Вы просто не учли, что на Arduino есть встроенные резисторы. Можно просто их активировать и использовать с нашим шилдом!
Для задействования этих встроенных подтягивающих резисторов надо установить пин в режим INPUT, а после уже активировать с помощью следующих строк:
Если вы используете подтягивающий резистор, важно помнить, что не нажатая кнопка дает сигнал HIGH, а нажатая – LOW.
Для того, чтобы настроить каждый пин на работу в режиме input и активации подтягивающих резисторов, можно использовать следующий код:
pinMode(PIN_BUTTON_RIGHT, INPUT);
digitalWrite(PIN_BUTTON_RIGHT, HIGH);
Как узнать, когда была нажата кнопка на джойстик шилде?
После одоления предыдущих пунктов, можно определять, нажата ли кнопка с помощью функции digitalRead(). Когда считываемое значение будет LOW, кнопка нажата, а когда значение равно HIGH, кнопка не нажата.
if (digitalRead(PIN_BUTTON_LEFT) == LOW) {
// Кнопка нажата
// Кнопка не нажата
Следующий пример отобразит состояние каждой кнопки и значения с джойстика в серийном мониторе Arduino IDE:
const byte PIN_BUTTON_SELECT = 2;
const byte PIN_BUTTON_RIGHT = 3;
const byte PIN_BUTTON_UP = 4;
const byte PIN_BUTTON_DOWN = 5;
const byte PIN_BUTTON_LEFT = 6;
const byte PIN_ANALOG_X = 0;
const byte PIN_ANALOG_Y = 1;
Serial.begin(9600);
pinMode(PIN_BUTTON_RIGHT, INPUT);
digitalWrite(PIN_BUTTON_RIGHT, HIGH);
pinMode(PIN_BUTTON_LEFT, INPUT);
digitalWrite(PIN_BUTTON_LEFT, HIGH);
pinMode(PIN_BUTTON_UP, INPUT);
digitalWrite(PIN_BUTTON_UP, HIGH);
pinMode(PIN_BUTTON_DOWN, INPUT);
digitalWrite(PIN_BUTTON_DOWN, HIGH);
pinMode(PIN_BUTTON_SELECT, INPUT);
digitalWrite(PIN_BUTTON_SELECT, HIGH);
Serial.print("l:");
Serial.print(digitalRead(PIN_BUTTON_LEFT));
Serial.print(" ");
Serial.print("r:");
Serial.print(digitalRead(PIN_BUTTON_RIGHT));
Serial.print(" ");
Serial.print("u:");
Serial.print(digitalRead(PIN_BUTTON_UP));
Serial.print(" ");
Serial.print("d:");
Serial.print(digitalRead(PIN_BUTTON_DOWN));
Serial.print(" ");
Serial.print("x:");
Serial.print(analogRead(PIN_ANALOG_X));
Serial.print(" ");
Serial.print("y:");
Serial.print(analogRead(PIN_ANALOG_Y));
Serial.print(" ");
Serial.print("s:");
Serial.print(digitalRead(PIN_BUTTON_SELECT));
Serial.print(" ");
Serial.println();
Оставляйте Ваши комментарии, вопросы и делитесь личным опытом ниже. В дискуссии часто рождаются новые идеи и проекты!
В проекте реализовано управление двумя серводвигателями с использованием джойстика и Arduino.
Управление джойстиком очень удобное и интуитивно понятное. Особенно для подобных проектов с двумя степенями свободы. Более детально с особенностями настройки и управлением джойстиком вы можете в соответствующей статье на сайт.
Необходимые материалы
- Плата Arduino (в данным случае используется Arduino Uno Rev 3).
- 2 сервы Parallax.
- Джойстик - тоже от Parallax.
- Маленькая монтажная плата.
- Коннекторы для подключения.
- Что-то для отслеживания перемещений серводвигателей (например, здесь используются поломанная веб-камера и кубики от лего. Детально в статье эти узлы не рассматриваются, но на фото видно).
Проект в собранном виде показан на рисунке ниже:
Подключаем серводвигатели
Начнем с подключения двух серводвигателей (для предварительного макета используется монтажная плата. В последствии можно сваять отдельный шилд).
На рисунке ниже представлена исчерпывающая информация про подключение.

Красный кабель двигателей (питание) - к пину 5V на Arduino
Черный кабель двигателей (земля) - к пину GND на Arduino
Желтый кабель от двигателя Right & Left (на некоторых моделях он белого цвета) - к пину 11.
Желтый кабель от двигателя Up & Down (на некоторых моделях он белого цвета) - к пину 4.
Не забывайте, что коннекторы управляющего сигнала на сервоприводах должны подключаться к ШИМ выходам Arduino.
Подключаем джойстик
Представленная на рисунке ниже схема подключения может вас немного смутить. Но поверьте, все не так сложно как кажется на первый взгляд. Опять таки для подключения используем монтажную плату.

1. На модуле джойстика один выход U/R+ и один L/R+. Это выходы для подключения питания. Эти выходы подключаются к пину 5V на Arduino.
2. Также есть два разъема L/R и два разъема U/D. Они подключаются к аналоговым входам А3 и А4.
3. Земля на джойстике подключается к земле на Arduino.
Не забудьте перепроверить подключение. Помните, что большинство ошибок в проектах возникает именно из-за неправильного подключения. Особенно если вы используете монтажную плату, которая обрастает кучей коннекторов.
Скетч для Arduino
Основные пояснения к скетчу приведены в комментариях. Приведенный ниже код достаточно скопировать и вставить в Arduino IDE. После загрузки скетча на плату, сервопривода не должны двигаться, пока вы не используете джойстик.
#include <Servo.h>
const int servo1 = 3; // первая серва
const int servo2 = 10; // вторая серва
const int joyH = 3; // выход L/R джойстика Parallax
const int joyV = 4; // выход U/D джойстика Parallax
int servoVal; // переменная для хранения данных с аналогового пина
Servo myservo1; // создаем объект Servo для управления первой сервой
Servo myservo2; // создаем объект Servo для управления второй сервой
myservo1.attach(servo1); // подключаем серву
myservo2.attach(servo2); // подключаем серву
// Инициализация серийного протокола связи
Serial.begin(9600);
// отображаем значения с джойстика с использованием серийного монитора
outputJoystick();
// считываем значение с джойстика по горизонтали (значение между 0 и 1023)
servoVal = analogRead(joyH);
servoVal = map(servoVal, 0, 1023, 0, 180); // масштабируем полученное значение для использования с серводвигателем (результат возвращается в диапазоне от 0 до 180)
myservo2.write(servoVal); // выводим ротор сервы в положение в соответствии с полученным масштабированным значением
// считываем значение джойстика вдоль вертикальной оси (значение от 0 до 1023)
servoVal = analogRead(joyV);
servoVal = map(servoVal, 0, 1023, 70, 180); //масштабируем полученное значение для использования с сервой (диапазон: от 70 до 180)
myservo1.write(servoVal); // выводим ротор второй сервы в соответствии с полученным масштабированным значением
delay(15); // ждем, пока серва обеспечит заданное положение
* отображаем значения джойстика
void outputJoystick(){
Serial.print(analogRead(joyH));
Serial.print ("---");
Serial.print(analogRead(joyV));
Serial.println ("----------------");
Результат представлен на видео ниже:
Возможные проблемы и их решение
1. Сервы не двигаются.
Проверьте подключение. Не забывайте, что для подключения серв используются ШИМ выходы, а для джойстика - аналоговые.
2. После загрузки скетча на Arduino, сервы начинают вибрировать.
Скорее всего, неправильно подключены пины U/D+ L/R+. Очень внимательно проверьте подключение. Перед проверкой контактов и подключения, обязательно отключите Arduino от персонального компьютера, чтобы случайно не спалить привода или плату.
3. Я внимательно проверил подключение, но серводвигатели все равно не двигаются.
Отключите джойстик и попробуйте его подключить заново. При этом джойстик лучше снять с монтажной платы. При повторной установке прижмите его с некоторым усилием к монтажной плате. Коннекторы от джойстика должны хорошо сесть на макетку.
Оставляйте Ваши комментарии, вопросы и делитесь личным опытом ниже. В дискуссии часто рождаются новые идеи и проекты!
Инструкция
Джойстик - удобное и лёгкое в использовании устройство для передачи информации. Видов джойстиков по количеству степеней свободы, принципу считывания показаний и используемым технологиям существует большое количество. Джойстики чаще всего используются для управления движением каких-либо механизмов, управляемых моделей, роботов. Аналоговый джойстик, который мы сегодня рассмотрим, представляет собой ручку, закреплённую на шаровом шарнире с двумя взаимно перпендикулярными осями. При наклоне ручки, ось вращает подвижный контакт потенциометра, благодаря чему изменяется напряжение на его выходе. Также аналоговый джойстик имеет тактовую кнопку, которая срабатывает при вертикальном надавливании на ручку.
Подключим джойстик по приведённой схеме. Аналоговые выходы X и Y джойстика подключим к аналоговым входам A1 и A2 Arduino, выход кнопки SW - к цифровому входу 8. Питание джойстика осуществляется напряжением +5 В.

Для того чтобы наглядно увидеть, как работает джойстик, напишем такой скетч. Объявим пины, зададим им режимы работы. Обратите внимание, в процедуре setup() мы подали на вход switchPin высокий уровень. Этим мы включили встроенный подтягивающий резистор на этом порту. Если его не включить, то, когда кнопка джойстика не нажата, 8-ой порт Arduino будет висеть в воздухе и ловить наводки. Это повлечёт за собой нежелательные хаотичные ложные срабатывания.
В процедуре loop() мы постоянно опрашиваем состояние кнопки и отображаем его с помощью светодиода на выходе 13. Из-за того, что вход switchPin подтянут к питанию, светодиод постоянно горит, а при нажатии кнопки гаснет, а не наоборот.
Далее мы считываем показания двух потенциометров джойстика - выхода осей X и Y. Arduino имеет 10-разрядные АЦП, поэтому значения, снимаемые с джойстика, лежат в диапазоне от 0 до 1023. В среднем положении джойстика, как видно на иллюстрации, снимаются значения в районе 500 - примерно середина диапазона.

Обычно джойстик используют для управления электродвигателями. Но почему бы не использовать его, например, для управления яркостью светодиода? Давайте подключим по приведённой схеме RGB светодиод (или три обычных светодиода) к цифровым портам 9, 10 и 11 Arduino, не забывая, конечно, о резисторах.

Будем менять яркость соответствующих цветов при изменении положения джойстика по осям, как показано на рисунке. Из-за того, что джойстик может быть не точно отцентрирован производителем и иметь середину шкалы не на отметке 512, а от 490 до 525, то светодиод может слегка светиться даже когда джойстик находится в нейтральном положении. Если вы хотите, чтобы он был полностью выключен, то внесите в программу соответствующие поправки.

Ориентируясь на приведённую диаграмму, напишем скетч управления Arduino яркостью RGB светодиода с помощью джойстика.
Сначала объявим соответствие пинов и две переменные - ledOn и prevSw - для работы с кнопкой. В процедуре setup() назначим пинам функции и подключим к пину кнопки подтягивающий резистор командой digitalWrite(swPin, HIGH) .
В цикле loop() определяем нажатие кнопки джойстика. При нажатии на кнопку переключаем режимы работы между режимом "фонарика" и режимом "цветомузыки".
В режиме freeMode() управляем яркостью светодиодов с помощью наклона джойстика в разные стороны: чем сильнее наклон по оси, тем ярче светит соответствующий цвет. Причём преобразование значений берёт на себя функция map(значение, отНижнего, отВерхнего, кНижнему, кВерхнему) . Функция map() переносит измеренные значения (отНижнего, отВерхнего) по осям джойстика в желаемый диапазон яркости (кНижнему, кВерхнему). Можно то же самое сделать обычными арифметическими действиями, но такая запись существенно короче.
В режиме discoMode() три цвета попеременно набирают яркость и гаснут. Чтобы можно было выйти из цикла при нажатии кнопки, каждую итерацию проверяем, не была ли нажата кнопка.
Для плат Arduino существуют модули аналоговых джойстиков. Как правило, имеющие ось X, Y и кнопку - ось Z. Джойстик позволяет более плавно и точно отслеживать степень отклонения от нулевой точки. А помимо удобства по сравнению с кнопками, это позволяет реализовывать более совершенные интерфейсы. К примеру, при изменении какого-либо значения в меню, можно написать программу таким образом, что чем сильнее отклонена ось джойстика, тем быстрее изменяется значение переменной. Например, нам необходимо изменить значение от 0 до 2000 с шагом в 1. Представьте, сколько раз вам потребовалось бы нажимать кнопку или писать специальный алгоритм, скажем при длительности нажатия больше 3 сек прибавлять изменять шаг на 10 или 100. А при использовании джойстика это можно реализовать намного проще.
Средняя цена на подобные модули колеблется в районе 1-2$ за модуль (с бесплатной доставкой в Россию). Поиск модулей в магазине AliExpress
Сами модули выглядят примерно так:
Не пугайтесь количеством выводов, это сделано для универсальности и удобства подключения. Контакты Vcc и GND между всеми тремя группами контактов соединены. Т.о. для подключения нужно 5 проводов: ось X, ось Y, кнопка Z, питание V cc и общий GND. Джойстики пассивные модули и не потребляют какую-либо энергию от платы Arduino. Питание V cc необходимо только для подтягивающих резисторов. Бывают модули без подтягивающих резисторов, в таком случае, необходимо вывод подключения кнопки подтянуть к +V cc через резистор 1-10 кОм.
Схема подключения к Arduino:
В программе, работать с джойстиком также очень просто:
#define axis_X 0 // Ось Х подключена к Analog 0 #define axis_Y 1 // Ось Y подключена к Analog 1 #define axis_Z 2 // Ось Z (кнопка джойстика) подключена к Digital 2 int value_X, value_Y, value_Z = 0; // Переменные для хранения значений осей void setup() { pinMode(axis_Z, INPUT); // Задаем как вход Serial.begin(9600); } void loop() { value_X = analogRead(axis_X); // Считываем аналоговое значение оси Х Serial.print("X:"); Serial.print(value_X, DEC); // Выводим значение в Serial Monitor value_Y = analogRead(axis_Y); // Считываем аналоговое значение оси Y Serial.print(" | Y:"); Serial.print(value_Y, DEC); // Выводим значение в Serial Monitor value_Z = digitalRead(axis_Z); // Считываем цифровое значение оси Z (кнопка) value_Z = value_Z ^ 1; // Инвертируем значение Serial.print(" | Z: "); Serial.println(value_Z, DEC); // Выводим значение в Serial Monitor delay(250); // Задержка 250 мс }
Как видно выше, в начале мы определяем входные пины для осей (define), а потом в главном цикле считываем значения с пинов и выводим их в Serial Monitor. И видим следующую картину:

Как видите все довольно просто. И напоследок напишем небольшую программу, целью которой будет изменять значение переменной, в зависимости от отклонения джойстика по оси Y от нулевой точки. А при нажатии на кнопку джойстика, переменная будет обнуляться.
#define axis_Y 1 // Ось Y подключена к Analog 1 #define axis_Z 2 // Ось Z (кнопка джойстика) подключена к Digital 2 int value, value_Y, value_Z = 0; // Переменные для хранения значений осей void setup() { pinMode(axis_Z, INPUT); // Задаем как вход Serial.begin(9600); } void loop() { value_Y = analogRead(axis_Y); // Считываем аналоговое значение оси Y if(value_Y >= 0 && value_Y < 100) value = value - 10; if(value_Y > 100 && value_Y < 300) value = value - 5; if(value_Y > 300 && value_Y < 520) value = value - 1; if(value_Y > 535 && value_Y < 700) value = value + 1; if(value_Y > 700 && value_Y < 900) value = value + 5; if(value_Y > 900) value = value + 10; value_Z = digitalRead(axis_Z); // Считываем цифровое значение оси Z (кнопка) if(value_Z == 0) value = 0; // Сброс значения Serial.println(value, DEC); // Выводим значение в Serial Monitor delay(500); // Задержка }
Является модулем ввода данных. С его помощью можно управлять роботами, манипуляторами, станками, различными моделями (машинки, танки, самолёты, вертолёты, квадрокоптеры, лодки и т.д.), а также использовать для создания игровых приставок, выбора пунктов меню на дисплеях и индикаторах, ввода значений, и т.д. Джойстик можно не только перемещать по осям X и Y, но и нажимать на него.
Видео:
Спецификация:
- Напряжение питания: 5 В / 3,3 В (оба напряжения входят в диапазон допустимых значений).
- Потребляемый ток: < 10 мА
- Габариты: 30x30 мм
Все модули линейки "Trema" выполнены в одном формате
Подключение:
- Выводы «X» и «Y» модуля подключается к любым аналоговым входам Arduino . Значения, считываемые с этих выводов, растут при перемещении джойстика слева на право и снизу вверх.
- Вывод «K» является цифровым и подключается к любому выводу Arduino . В обычном состоянии на нём уровень логического «0», а при нажатии на джойстик, он меняется на логическую «1».
- Выводы «V» и «G» являются выводами питания.
Модуль удобно подключать 3 способами, в зависимости от ситуации:
Способ - 1: Используя проводной шлейф и Piranha UNO
Используя провода «Папа - Мама », подключаем напрямую к контроллеру Piranha UNO

Способ - 2: Используя Trema Set Shield
Модуль можно подключить к любому из аналоговых входов Trema Set Shield.

Способ - 3: Используя проводной шлейф и Shield
Используя 5-и проводной шлейф, к Trema Shield, Trema-Power Shield, Motor Shield, Trema Shield NANO и тд.

Питание:
Входное напряжение 5 В или 3,3 В постоянного тока, подаётся на выводы Vcc (V) и GND (G).
Подробнее о модуле:
Данные модуля считываются с двух потенциометров и тактовой кнопки, механически связанных с рычагом джойстика. Кнопка подключена в разрыв питания Vcc и выхода «K», который прижат к GND через резистор. Следовательно, на выходе «K» может устанавливаться только два состояния: логический «0» (кнопка отпущена) или «1» (кнопка нажата). Выводы координат «X» и «Y» являются аналоговыми выходами модуля, они подключены к потенциометрам так, что напряжение снимаемое между этими выводами и GND растет при перемещении джойстика слева на право и снизу вверх.
Примеры:
Определение положения джойстика и включение светодиода по нажатию кнопки
const int8_t Xaxis = A0; // Определяем номер вывода, к которому подключен контакт оси Х джойстика const int8_t Yaxis = A1; // Определяем номер вывода, к которому подключен контакт оси У джойстика const int8_t Button = 2; // Определяем номер вывода, к которому подключен контакт кнопки джойстика const int8_t LED = 7; // Определяем номер вывода, к которому подключен светодиод uint16_t XborderMIN = 505; // Задаём границу значений, НИЖЕ которой будет считаться, что джойстик отклонён по оси Х влево uint16_t XborderMAX = 515; // Задаём границу значений, ВЫШЕ которой будет считаться, что джойстик отклонён по оси Х вправо uint16_t YborderMIN = 505; // Задаём границу значений, НИЖЕ которой будет считаться, что джойстик отклонён по оси У вниз uint16_t YborderMAX = 515; // Задаём границу значений, ВЫШЕ которой будет считаться, что джойстик отклонён по оси У вверх uint16_t Xvol = 0, Yvol = 0; // Задаём переменные, которые будут принимать значения, считанные с осей джойстика void setup() { Serial.begin(9600); // Инициируем передачу данных в монитор последовательного порта pinMode(LED, OUTPUT); // Настраиваем вывод LED на работу в режиме выхода pinMode(Button, INPUT); // Настраиваем вывод Button на работу в режиме входа } void loop() { Xvol = analogRead(Xaxis); // Считываем значения оси Х Yvol = analogRead(Yaxis); // Считываем значения оси У if (Xvol < XborderMIN) { // Проверяем, полученное значение Х меньше нижней границы центрального положения или нет. Если да, то if (Yvol < YborderMIN) { // проверяем, полученное значение У меньше нижней границы центрального положения или нет. Если да, то Serial.println("Left-Down"); // значит джойстик находится в положении ВЛЕВО-ВНИЗ } else if (Yvol > YborderMAX) { // Если же полученное значение У больше верхней границы центрального положения, то Serial.println("Left-Up"); // значит джойстик находится в положении ВЛЕВО-ВВЕРХ } else { Serial.println("Left"); // Если же полученное значение У входит в границы центрального положения по оси У, значит джойстик отклонён ВЛЕВО } } else if (Xvol > XborderMAX) { // Проверяем, полученное значение Х больше верхней границы центрального положения или нет. Если да, то if (Yvol < YborderMIN) { // проверяем, полученное значение У меньше нижней границы центрального положения или нет. Если да, то Serial.println("Right-Down"); // значит джойстик находится в положении ВПРАВО-ВНИЗ } else if (Yvol > YborderMAX) { // Если же полученное значение У больше верхней границы центрального положения, то Serial.println("Right-Up"); // значит джойстик находится в положении ВПРАВО-ВВЕРХ } else { Serial.println("Right"); // Если же полученное значение У входит в границы центрального положения по оси У, значит джойстик отклонён ВПРАВО } } else { // Если полученное значение Х входит в границы центрального положения по оси Х, значит if (Yvol < YborderMIN) { // проверяем, полученное значение У меньше нижней границы центрального положения или нет. Если да, то Serial.println("Down"); // значит джойстик находится в положении ВНИЗ } else if (Yvol > YborderMAX) { // Если же полученное значение У больше верхней границы центрального положения, то Serial.println("Up"); // значит джойстик находится в положении ВВЕРХ } else { Serial.println("Center"); // Если же полученное значение У входит в границы центрального положения по оси У, значит джойстик находится в центре. } } if (digitalRead(Button)) { // Проверяем, нажата ли кнопка delay(1); // Если кнопка была нажата, то подавляем дребезг digitalWrite(LED, !digitalRead(LED)); // и меняем состояние на выходе светодиода Serial.println("Button click!"); // Выводим текст о том, что кнопка была нажата while (digitalRead(Button)) {} // Если кнопка удерживается, то ничего не делаем delay(10); // Если кнопка отпускается, то подавляем дребезг } }В мониторе последовательного порта вы увидите.
 Пристенный дренаж фундамента цена Материалы и инструменты
Пристенный дренаж фундамента цена Материалы и инструменты Расстояние между колодцем и выгребной ямой: нормы СанПиН и СНиП Выгребная яма в многоквартирном доме
Расстояние между колодцем и выгребной ямой: нормы СанПиН и СНиП Выгребная яма в многоквартирном доме Установка стиральной машины и подключение к водопроводу
Установка стиральной машины и подключение к водопроводу Регулировка терморегулятора холодильника своими руками Самодельный термостат для холодильника на дискретных элементах
Регулировка терморегулятора холодильника своими руками Самодельный термостат для холодильника на дискретных элементах Мангал - коптильня из газовых баллонов своими руками Коптильня из пропанового баллона своими руками
Мангал - коптильня из газовых баллонов своими руками Коптильня из пропанового баллона своими руками Детский веломобиль своими руками - подробное описание и схема
Детский веломобиль своими руками - подробное описание и схема Способы сварки медных проводов Точечная сварка медных проводов
Способы сварки медных проводов Точечная сварка медных проводов