Circuito Levitron casero. Plataforma de bricolaje Levitron
Un breve vídeo sobre cómo es un Levitron fabricado:
www.youtube.com/watch?feature=player_embedded&v=vypjmqq9...
Si alguien no tiene miedo de hacer lo mismo interesante, aquí hay instrucciones detalladas para usted:
una pequeña teoría
Comencemos, quizás, con el diagrama mecánico de la plataforma Levitron, que, según tengo entendido, se ha desarrollado. En aras de la brevedad, aquí llamaré "chip" al imán que se cierne sobre la plataforma.
Bosquejo de la plataforma Levitron(arriba) se muestra en la Fig. 1.

En la Fig. 2 – diagrama de potencia de una sección vertical a lo largo del eje central de la plataforma (como la imagino) en reposo y sin corriente en las bobinas. Todo está bien, excepto que el estado de reposo en dicho sistema es inestable. El chip tiende a desplazarse del eje vertical del sistema y caer con fuerza sobre uno de los imanes. Cuando el chip "siente" el espacio sobre los imanes, se siente una "joroba" de fuerza sobre el centro de la plataforma con la parte superior apoyada en el eje central.

mg – peso de las virutas,
F1 y F2 son las fuerzas de interacción entre el chip y los imanes de la plataforma,
Fmag es el impacto total que equilibra el peso del chip,
DH – Sensores Hall.
En la Fig. 3. Se representa la interacción del chip con las bobinas (nuevamente, según tengo entendido), y se omiten las fuerzas restantes.

En la Figura 3 se puede ver que el propósito de controlar las bobinas es crear una fuerza horizontal Fss, siempre dirigida hacia el eje de equilibrio cuando ocurre un desplazamiento. X. Para hacer esto, basta con encender las bobinas para que la misma corriente en ellas cree un campo magnético en la dirección opuesta. Sólo queda una pequeña cosa: medir el desplazamiento del chip desde el eje (el valor X) y determinar la dirección de este desplazamiento utilizando sensores Hall, y luego pasar corrientes en las bobinas de intensidad adecuada.
La simple repetición de circuitos electrónicos no está en nuestras tradiciones, especialmente porque:
- no hay dos TDA2030A disponibles, pero sí TDA1552Q;
- no hay sensores Hall SS496 (disponibles por aproximadamente $2 cada uno), pero hay sensores similares al HW101, 3 piezas gratis en cada unidad de CD o DVD;
- demasiado vago para preocuparse por la fuente de alimentación bipolar.
Hojas de datos:
SS496 - http://sccatalog.honeywell.com/pdbdownload/images/ss496.seri...HW101- http://www.alldatasheet.com/datasheet-pdf/pdf/143838/ETC1/HW101A.html
El circuito consta de dos canales de amplificación idénticos con entradas diferenciales y salidas en puente. En la Fig. La Figura 4 muestra el diagrama completo de un solo canal de amplificación. Se utilizaron chips LM358 (http://www.ti.com/lit/ds/symlink/lm158-n.pdf) y TDA1552Q (http://www.nxp.com/documents/data_sheet/TDA1552Q_CNV.pdf).

Un par de sensores Hall están conectados a la entrada de cada canal para suministrar una señal diferencial al amplificador. Las salidas de los sensores están conectadas en direcciones opuestas. Esto significa que cuando un par de sensores están en un campo magnético con la misma intensidad, se suministra un voltaje de diferencia cero a la entrada del amplificador.
Las resistencias de equilibrio R10 son antiguas, soviéticas, de múltiples vueltas.
Al tratar de obtener una ganancia lo suficientemente alta del amplificador, obtuve una autoexcitación banal, presumiblemente debido a un desastre en la placa de circuito. En lugar de "limpiar", se introdujeron en el circuito circuitos RC R15C2 dependientes de la frecuencia; no son obligatorios. Si aún así fuera necesario instalarlos, entonces se debe seleccionar la resistencia R15 para que sea la más alta a la que se apaga la autoexcitación.
La fuente de alimentación de todo el dispositivo es un adaptador (pulso) de 12V 1,2A, reconfigurado a 15V. El consumo de energía en condiciones normales (con el ventilador apagado) acabó siendo bastante modesto: 210-220 mA.
Diseño
La carcasa elegida es una carcasa de accionamiento de 3,5”, que corresponde aproximadamente a las dimensiones de los prototipos. Para nivelar la plataforma
las patas están hechas de tornillos M3.
En la parte superior del cuerpo se corta un agujero perfilado, claramente visible en la Fig. 5. Posteriormente, se cubre con una placa de espejo decorativa fabricada en latón cromado, fijada con tornillos de discos duros.

1 – ubicaciones de instalación para imanes (abajo) e indicadores de equilibrio (opcional)
2 – “piezas polares” de las bobinas
3 – Sensores Hall
4 – LED de retroiluminación (opcional)
Los sensores Hall están ubicados en los orificios de la base de fibra de vidrio de la plataforma y están soldados a las patas enderezadas de los conectores (no sé el tipo). Los conectores se parecían a los de la Fig. 6.

Los sensores están soldados desde los motores de la unidad de CD o DVD. Allí se encuentran debajo del borde del rotor y son claramente visibles en la Fig. 7. Para un canal es necesario tomar un par de sensores del mismo motor; de esta manera serán lo más idénticos posible. Los sensores soldados se muestran en la Fig. 8.


Se compraron canillas de plástico para máquinas de coser, pero no había suficiente espacio para enrollarlas. Luego se cortaron las mejillas de los carretes y se pegaron a trozos de tubo de latón de paredes delgadas con un diámetro exterior de 6 mm y una longitud de 14 mm. El tubo solía ser un segmento de una antena de varilla telescópica. En cuatro de estos marcos, los devanados se enrollan con alambre de 0,3 mm "casi capa por capa" (¡sin fanatismo!) hasta llenarlos. La resistencia está alineada a 13 ohmios.
Imanes: rectangulares de 20x10x5 mm e imanes de disco con un diámetro de 25 y 30 mm, espesor de 4 mm (Fig.9) - todavía tenía que comprar... Los imanes rectangulares se instalan debajo de la base de la plataforma y las virutas están hechas de imanes de disco.

Vista del dispositivo desde abajo y desde atrás (al revés) - en la Fig. 10 y 11 (una leyenda para ambas figuras). El desorden es, por supuesto, pintoresco...
El chip U2 TDA1552Q (3) está ubicado en el disipador de calor (9), que anteriormente funcionaba en la tarjeta de video. El radiador en sí se fija con tornillos a las partes dobladas de la cubierta superior de la carcasa. El radiador (9) dispone además de una toma de corriente (1), tomas de control (2) y una unidad de control térmico (5).
Un trozo de fibra de vidrio, que solía ser un teclado, sirve como base de la plataforma. Las bobinas (7) se fijan a la base con tornillos y tuercas M4. Se le fijan imanes (6) mediante abrazaderas y tornillos autorroscantes.
Los enchufes de prueba (2) están hechos de un conector de alimentación de computadora y están conectados a la parte posterior del dispositivo cerca de las resistencias de equilibrio (10) para que sean fácilmente accesibles sin necesidad de desmontarlos. Las tomas están conectadas, por supuesto, a las salidas de ambos canales del amplificador.
El circuito del preamplificador y su estabilizador de potencia, incluidas las resistencias de equilibrio (10), se montó en una placa de pruebas y, como resultado del ajuste, se convirtió en una pintoresca pocilga, de la que tuvimos que abstenernos de tomar fotografías macro.


1 – fijación de la toma de corriente
2 – tomas de control
3-TDA1552Q
4 – interruptor de encendido
5 – unidad de control térmico
6 – imanes debajo de las abrazaderas
7 – bobinas
8 – derivaciones magnéticas
9 – disipador de calor
10 – resistencias de equilibrio
Configuración
Es obligatorio establecer ceros en las salidas de ambos canales cada vez que se activa la depuración. Sin fanatismo: +–20 mV es una precisión bastante aceptable. Puede haber alguna influencia mutua entre los canales, por lo que si la desviación inicial es significativa (más de 1-1,5 voltios en la salida del canal), es mejor establecer ceros dos veces. Vale la pena recordar que con una caja de hierro, el equilibrio entre un dispositivo desmontado y ensamblado tiene dos grandes diferencias.
Comprobando la fase del canal
El chip debe tomarse en la mano y colocarse sobre el centro de la plataforma del Levitron encendido a una altura de aproximadamente 10-12 mm. Los canales se verifican uno por uno y por separado. Al mover el chip con la mano a lo largo de la línea que conecta los sensores opuesta al centro, la mano debe sentir una resistencia notable creada por el campo magnético de las bobinas. Si no se siente resistencia, pero la mano con el chip "sale volando" del eje, es necesario intercambiar los cables de la salida del canal que se está probando.
Ajustar la posición del chip flotante.
En los videos sobre Levitrons de plataforma caseros, a menudo se puede ver que el chip flota en una posición inclinada, incluso si está hecho a base de discos magnéticos, es decir, es bastante simétrico. Hubo cierta distorsión en el diseño descrito. Quizás la culpa sea de la carcasa metálica...
El primer pensamiento: mueva los imanes hacia abajo en el lado donde el chip está demasiado "apoyado".
Segundo pensamiento: mueva los imanes más lejos del centro en el lado donde el chip está excesivamente “apoyado”.
Tercer pensamiento: si los imanes se desplazan, entonces el eje magnético del sistema de imanes permanentes de la plataforma estará sesgado con respecto al eje magnético del sistema de bobinas, por lo que el comportamiento del chip se volverá impredecible (especialmente si su peso es diferente ).
La cuarta idea: reforzar los imanes en el lado donde está inclinado el chip se descartó por poco realista, porque no había dónde conseguir una amplia gama de imanes para su montaje.
La quinta idea: debilitar los imanes en el lado donde el chip está demasiado "apoyado" resultó ser un éxito. Además, es bastante sencillo de implementar. Un imán, como fuente de campo magnético, se puede desviar, es decir, se puede cortocircuitar parte del flujo magnético, de modo que el campo magnético en el espacio circundante se debilita ligeramente. Como derivaciones magnéticas se utilizaron pequeños anillos de ferrita (10x6x3, 8x4x2, etc.), extraídos libremente de lámparas ahorradoras de espacio (8 en la Fig. 10). Estos anillos solo necesitan ser magnetizados con un imán demasiado fuerte (o dos o tres) en el lado más alejado del centro de la plataforma. Resultó que al seleccionar el número y el tamaño de las derivaciones para cada imán "demasiado fuerte", se puede nivelar con bastante precisión la posición del chip simétrico flotante. ¡Recuerde realizar el balanceo eléctrico después de cada cambio en el sistema magnético!
Opciones
Las opciones incluyen: indicadores de desequilibrio del amplificador, unidad de control térmico, retroiluminación y patas de plataforma ajustables.
Los indicadores de desequilibrio del amplificador son dos pares de LED ubicados en los mismos radios que los sensores, en lo profundo de la base de fibra de vidrio de la plataforma (1 en la Fig. 5). Los LED, muy pequeños y planos, solían funcionar en algún tipo de módem, pero también funcionarán desde un teléfono móvil antiguo (en versión SMD). Los LED están empotrados en los orificios, ya que el chip, al caer desde el centro, cae sobre el imán más cercano y es bastante capaz de destruir el LED.
El diagrama de indicadores para un canal se muestra en la Fig. 12. Los LED deben tener un voltaje de funcionamiento de 1,1-1,2 V, es decir. rojo simple, naranja, amarillo. Con voltajes de LED más altos (2,9-3,3 V para los más brillantes), se debe recalcular el número de diodos en la cadena D3-D6 para minimizar la "zona muerta": el voltaje mínimo en la salida del canal en el que ninguno de los LED brilla.

Coloqué los indicadores de modo que brille aquel hacia el cual está desplazado el chip desde el centro. Los indicadores le ayudan a colgar fácilmente el chip sobre el Levitron, así como a nivelar la plataforma. En condiciones normales están todos apagados.
El diagrama de la unidad de control térmico se muestra en la Fig. 13. Su finalidad es evitar el sobrecalentamiento del amplificador final. A la salida de la unidad térmica se enciende un ventilador de 50x50 mm 12V 0,13A desde la computadora.

En el circuito de la unidad térmica es fácil reconocer un disparador Schmitt ligeramente modificado. En lugar del primer transistor, se utilizó el microcircuito TL431. El tipo de transistor Q1 se indica de forma condicional: conecté el primer NPN que encontré que podía soportar la corriente de funcionamiento del ventilador. Como sensor de temperatura se utilizó un termistor que se encuentra en una placa base antigua en el zócalo del procesador. El sensor de temperatura va pegado al disipador del amplificador final. Al seleccionar la resistencia R1, puede ajustar la unidad térmica para que funcione a una temperatura de 50-60 ° C. La resistencia R5, junto con la corriente del colector Q1, determina la cantidad de histéresis del circuito en relación con el voltaje en la entrada de control U1.
En el diagrama de la Fig. 13, se introduce la resistencia R7 para reducir el voltaje en el ventilador y, en consecuencia, el ruido del mismo.
En la Fig. 14 se puede ver cómo el ventilador está incrustado en la tapa inferior de la carcasa.

Otra forma de utilizar una unidad térmica es conectar el chip amplificador final al pin de control MUTE (Fig. 15). El valor del valor R5 indicado en el diagrama supone que MUTE (pin 11 del chip U2 en la Fig. 4) está conectado a la fuente de alimentación a través de una resistencia de 1 kOhm (¡NO directamente, como en la hoja de datos!). En este caso no se necesita ventilador. Es cierto que cuando se aplica la señal MUTE al amplificador, el chip se cae y, una vez eliminada la señal MUTE, (¿por alguna razón?) no despega.

Luz de fondo: 4 LED brillantes con un diámetro de 3 mm, ubicados oblicuamente hacia el centro en los orificios de la base de la plataforma y la placa decorativa en aquellos lugares donde el chip no cae. Se conectan en serie y mediante una resistencia de 150 Ohm al circuito general de alimentación del dispositivo de 15V.
Conclusión
Capacidad de carga
Para “rematar” el tema, se eliminaron las “características de carga” del Levitron con chips de 25 y 30 mm de diámetro. Aquí llamé características de carga a la dependencia de la altura del chip que se cierne sobre la plataforma (desde la placa decorativa) del peso total del chip.
Para un chip con un imán de 25 mm y un peso total de 19 g, la altura máxima fue de 16 mm y la mínima fue de 8 mm con un peso de 38 g. Entre estos puntos la característica es casi lineal. Para un chip con un imán de 30 mm, la característica de carga resultó estar entre los puntos de 16 mm a 24 gy 8 mm a 48 g.
Desde una altura inferior a 8 mm desde la plataforma, el chip cae, siendo atraído por los núcleos de hierro de las bobinas.
¡NO te guste!
En primer lugar, no debes escatimar en sensores. Los sensores Hall "desnudos", extraídos en pares para cada canal de dos motores (es decir, ¡casi idénticos!), aún exhiben su coeficiente de resistencia a la temperatura escandalosamente grande. Incluso con los mismos circuitos de alimentación y conexión contradiferencial de las salidas del sensor, puede obtener un cambio cero notable en la salida del canal cuando cambia la temperatura. Los sensores integrados SS496 (SS495) no solo tienen un amplificador incorporado, sino también estabilización térmica. Un amplificador de sensor interno hará que la ganancia general de los canales sea significativamente mayor y su circuito de alimentación será más sencillo.
En segundo lugar, si es posible, debe abstenerse de colocar el Levitron en una caja de hierro.
En tercer lugar, sigue siendo preferible la fuente de alimentación bipolar, porque es más fácil controlar la ganancia y ajustar los ceros.
¡Gracias por su atención!
Levitron, como saben, es una peonza que gira en el aire sobre una caja en la que opera una fuente de campo magnético. Puedes fabricar un Levitron a partir de un sensor de pasillo popular.
¿Qué es Levitrón?
¡ATENCIÓN! ¡Se ha encontrado una forma completamente sencilla de reducir el consumo de combustible! ¿No me crees? Un mecánico de automóviles con 15 años de experiencia tampoco lo creyó hasta que lo probó. ¡Y ahora ahorra 35.000 rublos al año en gasolina!
Levitron es un juguete. No tiene sentido comprarlo si conoces las opciones para fabricar un dispositivo casero. No habrá nada complicado en el diseño de un Levitron de este tipo si hay un sensor Hall normal, por ejemplo, comprado para un distribuidor de automóviles y dejado para uso futuro.
Debes saber que el efecto de levitación siempre se observa en una zona bastante estrecha. Estas realidades limitan un poco la libertad de acción de los artesanos; sin embargo, con paciencia y tiempo, siempre se puede configurar Levitron de manera eficiente y efectiva. Prácticamente no se caerá ni saltará.
Levitron del sensor hall
Levitron para sensor hall y la idea de su fabricación es sencilla, como todo ingenioso. Gracias a la fuerza del campo magnético, un trozo de cualquier material con propiedades electromagnéticas se eleva en el aire.

Para crear el efecto de “flotar”, flotando en el aire, la conexión se realiza con alta frecuencia. En otras palabras, el campo magnético parece levantar y arrojar el material.
El diseño del dispositivo es demasiado simple, e incluso un escolar que no haya asistido en vano a lecciones de física podrá construir todo por su cuenta.
- Necesita un LED (su color se selecciona según las preferencias individuales).
- Transistores RFZ 44N (aunque cualquier dispositivo de campo cercano a estos parámetros servirá).
- Diodo 1N 4007.
- Resistencias de 1 kOhm y 330 Ohm.
- En realidad, el propio sensor Hall (A3144 u otro).
- Hilo de cobre para enrollar de 0,3-0,4 mm (unos 20 metros serán suficientes).
- Imán de neodimio en forma de pastilla de 5x1 mm.
- Cargador de 5 voltios diseñado para teléfonos móviles.
Ahora en detalle sobre cómo se realiza el montaje:
- Se fabrica un marco para el electroimán con exactamente los mismos parámetros que en la foto. 6 mm es el diámetro, unos 23 mm es la longitud del enrollado, 25 mm es el diámetro de las mejillas con un margen. El marco está hecho de cartón y una hoja de cuaderno normal, utilizando superpegamento.

- El extremo del alambre de cobre se fija en el carrete y luego se enrolla (aproximadamente 550 vueltas). No importa en qué dirección lo enrolles. El otro extremo del cable también está fijo, la bobina por ahora se deja a un lado.
- Soldamos todo según el diagrama.
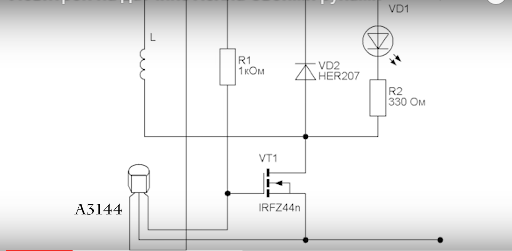
- El sensor Hall se suelda a los cables y luego se coloca en la bobina. Debe insertarlo dentro de la bobina y asegurarlo con medios improvisados.
Atención. La zona sensible del sensor (se puede determinar en la documentación del sensor Hall) debe mirar paralela al suelo. Por lo tanto, antes de insertar el sensor en la bobina, se recomienda doblar un poco este lugar.

- La bobina se suspende y se le suministra energía a través de una placa previamente soldada. La bobina se fija mediante un trípode.

Ahora puedes comprobar cómo funciona Levitron. Cualquier material electrificado se puede llevar a la bobina desde abajo. Será atraído por la bobina o repelido, dependiendo de la polaridad. Pero necesitamos que el material cuelgue en el aire, que flote. Este será el caso si la forma del material no es demasiado pequeña en relación con la bobina.
Nota. Si el imán en forma de tableta es pequeño, no levitará de manera muy efectiva. Puede caer. Para eliminar errores en el trabajo, debe desplazar el centro de gravedad del material hacia abajo; una hoja de papel común servirá como carga.
En cuanto al LED, no es necesario instalarlo. Por otro lado, si quieres más efecto, puedes organizar un espectáculo a contraluz.
Levitron casero en versión clásica sin sensor
Como puede ver, gracias a la presencia de un sensor Hall, fue posible crear un juguete bastante impresionante. Sin embargo, esto no significa en absoluto que no se pueda hacer sin un sensor. Por el contrario, un Levitron casero en la versión clásica es simplemente un imán grande del altavoz (13-15 cm de diámetro) y un anillo magnético pequeño para la parte superior (2-3 cm de diámetro), sin utilizar ningún sensor.
El eje de la parte superior suele estar hecho de un bolígrafo o lápiz viejo. Lo principal es que la varilla se selecciona de modo que encaje perfectamente en el centro del anillo magnético. Luego se corta la parte sobrante del mango (de unos 10 cm de largo junto con el imán adjunto para la parte superior, que es lo que necesitas).
El esquema de fabricación clásico de Levitron también implica la presencia de una docena de arandelas diferentes cortadas de papel grueso. ¿Para qué se necesitan? Si en el caso descrito anteriormente también se utilizó papel, y como recordamos, para desplazar el centro de gravedad hacia abajo o, más simplemente, para ajustarlo. Es lo mismo aqui. Se necesitarán arandelas para un ajuste ideal de la parte superior (si es necesario, se colocan después del anillo magnético en la varilla).

Atención. Para que una tapa casera levita perfectamente, además de ajustarla con arandelas, es necesario no equivocarse con la polaridad. En otras palabras, instale el anillo magnético coaxialmente con el imán grande.

Pero eso no es todo. Tanto en el primer caso (utilizando un sensor Hall) como en el segundo, es necesario lograr la uniformidad ideal de la fuente de atracción. En otras palabras, coloque un imán grande sobre una superficie perfectamente plana. Para ello se utilizan soportes de madera de distintos espesores. Si el imán no está nivelado, se colocan soportes en un lado o en varios lados, ajustando así la uniformidad.
Levitrones de plataforma
El circuito de plataforma de Levitron se diferencia, por regla general, por la presencia no de uno, sino de varios imanes fuente. En este caso, el material o peonza que flota en el aire tenderá a caer sobre uno de los imanes, desplazándose del eje vertical. Para evitar esto, es necesario poder ajustar la zona central de atracción y hacerlo con perfecta precisión.
Y aquí vienen al rescate esas mismas bobinas, con un sensor Hall insertado en su interior. Dejemos que haya dos de esas bobinas y deben colocarse exactamente en el medio de la plataforma, entre los imanes. En el diagrama se verá así (1 y 2 son imanes).

Del diagrama queda claro que el propósito de controlar las bobinas es crear una fuerza horizontal, un centro de gravedad. Esta fuerza se llama formalmente Fss y se dirige hacia el eje de equilibrio cuando ocurre un desplazamiento, indicado en el diagrama como X.
Si conectas las bobinas de manera que el pulso cree una zona con polaridad inversa, puedes solucionar el problema con el offset. Cualquier físico lo confirmará.
Cualquier reproductor de DVD antiguo se puede utilizar como carcasa para la plataforma de diseño Levitron. Se le quitan todos los “interiores”, se instalan imanes y bobinas y, por motivos de belleza, se cierra la parte superior con una práctica tapa hecha de un material fino, posiblemente transparente (permeable al campo magnético).
Los sensores Hall deben sobresalir a través de los orificios de la plataforma y deben soldarse a las patas enderezadas de los conectores.
En cuanto a los imanes, estos pueden ser elementos redondos de 4 mm de espesor. Es deseable que uno de los imanes tenga un diámetro mayor que el segundo. Por ejemplo, 25 y 30 mm.
También hay versiones más complejas de Levitrons, hechas según el esquema de hacer girar una peonza ubicada dentro de un pequeño globo. Estos Levitrones también se pueden construir utilizando sensores Hall, componentes eficaces que han supuesto toda una revolución en la industria automovilística y otras áreas de la actividad humana.
La idea de este tutorial se inspiró en un proyecto de la plataforma de crowdfunding Kickstarter llamado “Air Bonsai”, un proyecto realmente hermoso y misterioso realizado por los japoneses.
Pero cualquier misterio puede explicarse si miras hacia dentro. En realidad, se trata de levitación magnética en la que hay un objeto levitando desde arriba y un electroimán controlado por un circuito. Intentemos implementar este misterioso proyecto juntos.

Descubrimos que el diseño del dispositivo en Kickstarter era bastante complejo, sin ningún microcontrolador. No había forma de encontrar su circuito analógico. De hecho, si miras más de cerca, el principio de levitación es bastante simple. Necesita hacer una parte magnética que "flote" sobre otra parte magnética. El principal trabajo posterior fue garantizar que el imán levitante no cayera.
También se ha especulado que hacer esto con un Arduino es en realidad mucho más fácil que tratar de entender los circuitos de un dispositivo japonés. De hecho, todo resultó mucho más sencillo.
La levitación magnética consta de dos partes: la parte base y la parte flotante (levitante).
Base
Esta parte está en la parte inferior, que consta de un imán para crear un campo magnético circular y electroimanes para controlar este campo magnético.
Cada imán tiene dos polos: norte y sur. Los experimentos muestran que los polos opuestos se atraen y los polos iguales se repelen. Se colocan cuatro imanes cilíndricos en un cuadrado y tienen la misma polaridad, formando un campo magnético circular hacia arriba para empujar hacia afuera cualquier imán que tenga el mismo polo entre ellos.
Hay cuatro electroimanes en general, están colocados en un cuadrado, dos imanes simétricos son un par y su campo magnético es siempre opuesto. El sensor de efecto Hall y el circuito controlan los electroimanes. Creamos polos opuestos en los electroimanes haciendo pasar corriente a través de ellos.
parte flotante
La pieza incluye un imán flotante sobre la base que puede transportar una pequeña maceta u otros artículos.
El imán de arriba es elevado por el campo magnético de los imanes de abajo, porque tienen los mismos polos. Sin embargo, por regla general, tienden a caer y atraerse entre sí. Para evitar que la parte superior del imán se voltee y caiga, los electroimanes crearán campos magnéticos para empujar o tirar para equilibrar la parte flotante, gracias al sensor de efecto Hall. Los electroimanes están controlados por dos ejes X e Y, lo que hace que el imán superior se mantenga equilibrado y flotante.
Controlar electroimanes no es fácil y requiere un controlador PID, que se analiza en detalle en el siguiente paso.
Paso 2: controlador PID (PID)

De Wikipedia: "Un controlador proporcional-integral-derivado (PID) es un dispositivo en un circuito de control con retroalimentación. Se utiliza en sistemas de control automático para generar una señal de control con el fin de obtener la precisión y calidad requeridas del proceso transitorio. El controlador PID genera una señal de control, que es la suma de tres términos, el primero de los cuales es proporcional a la diferencia entre la señal de entrada y la señal de retroalimentación (señal de desajuste), el segundo es la integral de la señal de desajuste, el tercero es la derivada de la señal de desajuste."
En términos simples: “El controlador PID calcula el valor de “error” como la diferencia entre la [Entrada] medida y la configuración deseada. El controlador intenta minimizar el error ajustando [la salida]”.
Entonces le dice al PID qué medir (entrada), qué valor desea y una variable que ayudará a tener ese valor como salida. Luego, el controlador PID ajusta la salida para que la entrada sea igual a la configuración.
Por ejemplo: En un automóvil tenemos tres valores (Entrada, Configuración, Salida): velocidad, velocidad deseada y ángulo del pedal del acelerador, respectivamente.
En este proyecto:
- La entrada es el valor actual en tiempo real del sensor Hall, que se actualiza continuamente a medida que la posición del imán flotante cambia en tiempo real.
- El valor establecido es el valor del sensor Hall, que se mide cuando el imán flotante está en la posición de equilibrio, en el centro de la base del imán. Este índice es fijo y no cambia con el tiempo.
- La señal de salida es velocidad para controlar los electroimanes.
Gracias a la comunidad Arduino por escribir la biblioteca PID, que es muy fácil de usar. Más información sobre Arduino PID está disponible en el sitio web oficial de Arduino. Necesitamos usar un par de controladores PID bajo Arduino, uno para el eje X y otro para el eje Y.
Paso 3: Accesorios

La lista de componentes de la lección resulta decente. A continuación se muestra una lista de componentes que debes comprar para este proyecto, asegúrate de tener todo antes de comenzar. Algunos de los componentes son muy populares y es probable que los encuentre en su propio almacén o en su casa.

Paso 4: Herramientas
Aquí hay una lista de las herramientas más utilizadas:
- Soldador
- Sierra de mano
- Multímetro
- Perforar
- Osciloscopio (opcional, puedes usar un multímetro)
- Taladro de banco
- Pegamento caliente
- Alicates
Paso 5: amplificador operacional LM324, controlador L298N y SS495a

Amplificador operacional LM324
Los amplificadores operacionales (op-amps) se encuentran entre los circuitos más importantes, más utilizados y versátiles que se utilizan en la actualidad.
Utilizamos un amplificador operacional para amplificar la señal del sensor Hall, cuyo propósito es aumentar la sensibilidad para que Arduino pueda detectar fácilmente el cambio en el campo magnético. Un cambio de unos pocos mV en la salida del sensor Hall, después de pasar por el amplificador, puede cambiar en varios cientos de unidades en Arduino. Esto es necesario para garantizar un funcionamiento suave y estable del controlador PID.
El amplificador operacional común que elegimos es el LM324, es barato y puedes comprarlo en cualquier tienda de electrónica. El LM324 tiene 4 amplificadores internos que permiten su uso flexible, sin embargo en este proyecto solo se necesitan dos amplificadores: uno para el eje X y otro para el eje Y.
módulo L298N
El puente H dual L298N se usa comúnmente para controlar la velocidad y la dirección de dos motores de CC, o acciona fácilmente un solo motor paso a paso bipolar. El L298N se puede utilizar con motores de 5 a 35 VCC.
También hay un regulador de 5V incorporado, por lo que si el voltaje de suministro es de hasta 12V, también puede conectar una fuente de alimentación de 5V desde la placa.
Este proyecto utiliza L298N para accionar dos pares de bobinas de electroimán y utiliza la salida de 5 V para alimentar el sensor Arduino y Hall.
Distribución de pines del módulo:
- Salida 2: par de electroimanes X
- Salida 3: par de solenoides Y
- Potencia de entrada: entrada DC 12V
- Tierra: Tierra
- Salida de 5v: 5v para sensores Arduino y Hall
- EnA: Habilita la señal PWM para la salida 2
- In1: Habilitar para salida 2
- In2: Habilitar para Out 2
- In3: Habilitar para salida 3
- In4: Habilitar para salida 3
- EnB: Habilita la señal PWM para Out3
Conexión a Arduino: Necesitamos quitar 2 puentes en los pines EnA y EnB, luego conectar 6 pines In1, In2, In3, In4, EnA, EnB a Arduino.
Sensor de pasillo SS495a
SS495a es un sensor Hall lineal con salida analógica. Tenga en cuenta la diferencia entre salida analógica y salida digital, no puede utilizar un sensor con salida digital en este proyecto, solo tiene dos estados 1 o 0, por lo que no puede medir la salida de campos magnéticos.
El sensor analógico dará como resultado un rango de voltaje de 250 a Vcc, que puedes leer usando la entrada analógica de Arduino. Para medir el campo magnético en los ejes X e Y se necesitan dos sensores Hall.
Paso 6: Imanes de neodimio NdFeB (Neodimio Hierro Boro)

De Wikipedia: "El neodimio es un elemento químico, un metal de tierras raras de color blanco plateado con un tinte dorado. Pertenece al grupo de los lantánidos. Se oxida fácilmente en el aire. Descubierto en 1885 por el químico austriaco Karl Auer von Welsbach. Utilizado como un componente de aleaciones con aluminio y magnesio para aviones y ciencia espacial."
El neodimio es un metal ferromagnético (específicamente, exhibe propiedades antiferromagnéticas), lo que significa que, al igual que el hierro, puede magnetizarse para convertirse en un imán. Pero su temperatura Curie es de 19K (-254°C), por lo que su magnetismo puro sólo aparece a temperaturas extremadamente bajas. Sin embargo, los compuestos de neodimio con metales de transición como el hierro pueden tener temperaturas de Curie muy por encima de la temperatura ambiente y se utilizan para fabricar imanes de neodimio.
Fuerte es la palabra utilizada para describir un imán de neodimio. No se pueden utilizar imanes de ferrita porque su magnetismo es demasiado débil. Los imanes de neodimio son mucho más caros que los imanes de ferrita. Se utilizan imanes pequeños para la base, imanes grandes para la parte flotante/levitante.
Atención! Debe tener cuidado al utilizar imanes de neodimio, ya que su fuerte magnetismo puede dañarlo o dañar los datos de su disco duro u otros dispositivos electrónicos afectados por campos magnéticos.
Consejo! Puedes separar dos imanes tirando de ellos horizontalmente, no puedes separarlos en la dirección opuesta porque su campo magnético es demasiado fuerte. También son muy frágiles y se rompen con facilidad.
Paso 7: Preparando la Base

Nosotros utilizamos una pequeña maceta de terracota, que normalmente se utiliza para cultivar una suculenta o un cactus. También puedes utilizar una maceta de cerámica o una maceta de madera si son adecuadas. Utilice una broca de 8 mm para crear un agujero en el fondo de la olla, que se utiliza para sujetar el enchufe de CC.
Paso 8: Impresión 3D de la pieza flotante

Si tienes una impresora 3D, genial. Tienes la capacidad de hacer todo con él. Si no tienes impresora, no te desesperes, porque... Puede utilizar un servicio de impresión 3D económico que ahora es muy popular.
Para el corte por láser, los archivos también se encuentran en el archivo de arriba: el archivo AcrylicLaserCut.dwg (esto es autocad). La parte acrílica se utiliza para soportar los imanes y electroimanes, el resto se utiliza para cubrir la superficie de la maceta de terracota.
Paso 9: Prepare el módulo del sensor Hall SS495a


Corte el diseño de la PCB en dos partes, una parte para conectar el sensor Hall y la otra para conectar el circuito LM324. Conecte dos sensores magnéticos perpendiculares a la PCB. Utilice cables finos para conectar los dos pines de los sensores VCC, haga lo mismo con los pines GND. Los contactos de salida están separados.
Paso 10: circuito del amplificador operacional
Suelde el zócalo y las resistencias a la PCB siguiendo el diagrama, prestando atención a colocar los dos potenciómetros en la misma dirección para facilitar la calibración posterior. Conecte el LM324 al enchufe, luego conecte las dos salidas del módulo del sensor Hall al circuito del amplificador operacional.
Conecte los dos cables de salida del LM324 al Arduino. Entrada de 12 V con entrada de 12 V del módulo L298N, salida de 5 V del módulo L298N a potenciómetro de 5 V.
Paso 11: Montaje de los electroimanes
Ensamble los electroimanes sobre una lámina acrílica, se fijan en cuatro orificios cerca del centro. Apriete los tornillos para evitar movimientos. Dado que los electroimanes son simétricos en el centro, siempre están en polos opuestos, por lo que los cables en el interior de los electroimanes están conectados entre sí y los cables en el exterior de los electroimanes están conectados a L298N.
Pase los cables debajo de la lámina acrílica a través de los orificios adyacentes para conectarlos al L298N. El alambre de cobre está cubierto con una capa aislante, por lo que debes quitarlo con un cuchillo antes de poder soldarlos.
Paso 12: Módulo de sensor e imanes
Utilice pegamento caliente para fijar el módulo del sensor entre los electroimanes, tenga en cuenta que cada sensor debe ser cuadrado con dos electroimanes, uno en el frente y otro en la parte posterior. Intente calibrar los dos sensores lo más centralmente posible para que no se superpongan, lo que hará que el sensor sea más efectivo.
El siguiente paso es montar los imanes de base acrílica. Al combinar dos imanes D15*4 mm y un imán D15*3 mm para formar un cilindro, los imanes y electroimanes tendrán la misma altura. Ensamble imanes entre pares de electroimanes, tenga en cuenta que los polos de los imanes ascendentes deben ser iguales.
Paso 13: Conector de alimentación CC y salida L298N de 5 V

Suelde la toma de corriente CC con dos cables y utilice un tubo termorretráctil. Al conectar el conector de alimentación de CC a la entrada del módulo L298N, su salida de 5 V suministrará energía al Arduino.
Paso 14: L298N y Arduino

Conecte el módulo L298N a Arduino siguiendo el diagrama anterior:
L298N → Arduino
5V → VCC
Tierra → Tierra
EnA → 7
B1 → 6
B2 → 5
B3 → 4
B4 → 3
EnB → 2

Paso 15: Programador Arduino Pro Mini

Dado que el Arduino pro mini no tiene un puerto USB a serie, es necesario conectar un programador externo. FTDI Basic se utilizará para programar (y alimentar) el Pro Mini.
Como sabes, la Tierra, debido al orden mundial actual, tiene un cierto, y el sueño del hombre siempre ha sido superarlo por cualquier medio. La levitación magnética es un término más fantástico que el que se relaciona con la realidad cotidiana.
Inicialmente, se refería a la hipotética capacidad de superar de alguna manera la gravedad y mover personas u objetos por el aire sin equipo auxiliar. Sin embargo, ahora el concepto de "levitación magnética" ya es bastante científico.
Se están desarrollando varias ideas innovadoras a la vez que se basan en este fenómeno. Y todos ellos prometen excelentes oportunidades para aplicaciones versátiles en el futuro. Es cierto que la levitación magnética no se llevará a cabo mediante técnicas mágicas, sino mediante logros muy específicos de la física, es decir, la sección que estudia los campos magnéticos y todo lo relacionado con ellos.
Sólo un poco de teoría
Entre las personas alejadas de la ciencia, existe la opinión de que la levitación magnética es el vuelo guiado de un imán. De hecho, este término significa superar la gravedad de un objeto mediante un campo magnético. Una de sus características es la presión magnética, que se utiliza para “combatir” la gravedad.
En pocas palabras, cuando la gravedad tira de un objeto hacia abajo, la presión magnética se dirige de modo que lo empuja en la dirección opuesta: hacia arriba. Así es como se produce la levitación magnética. La dificultad para implementar la teoría es que el campo estático es inestable y no se concentra en un punto determinado, por lo que es posible que no pueda resistir eficazmente la gravedad. Por tanto, se requieren elementos auxiliares que den estabilidad dinámica al campo magnético para que la levitación del imán sea un fenómeno regular. Se utilizan diversas técnicas como estabilizadores. La mayoría de las veces, corriente eléctrica a través de superconductores, pero hay otros avances en esta área.

Levitación técnica
En realidad, la variedad magnética se refiere a un término más amplio para superar la atracción gravitacional. Entonces, levitación técnica: una revisión de los métodos (muy breve).
Parece que hemos descubierto un poco con la tecnología magnética, pero también existe un método eléctrico. A diferencia del primero, el segundo puede utilizarse para manipular productos fabricados con diversos materiales (en el primer caso, sólo magnetizados), incluso dieléctricos. También se distinguen la levitación electrostática y electrodinámica.
Kepler predijo la capacidad de las partículas para moverse bajo la influencia de la luz. Y la existencia fue probada por Lebedev. El movimiento de una partícula en la dirección de la fuente de luz (levitación óptica) se llama fotoforesis positiva y en la dirección opuesta, negativa.

La levitación aerodinámica, a diferencia de la óptica, tiene una aplicación bastante amplia en las tecnologías modernas. Por cierto, la "almohada" es una de sus variedades. El colchón de aire más simple se obtiene muy fácilmente: se perforan muchos orificios en el sustrato portador y se sopla aire comprimido a través de ellos. En este caso, el elevador aéreo equilibra la masa del objeto y éste flota en el aire.
El último método conocido actualmente por la ciencia es la levitación mediante ondas acústicas.

¿Cuáles son algunos ejemplos de levitación magnética?
Los escritores de ciencia ficción soñaron con dispositivos portátiles del tamaño de una mochila que pudieran "levitar" a una persona en la dirección que necesitaba a una velocidad considerable. Hasta ahora, la ciencia ha tomado un camino diferente, más práctico y factible: se creó un tren que se mueve mediante levitación magnética.
Historia de los súper trenes.
La idea de una composición que utiliza un motor lineal fue propuesta por primera vez (e incluso patentada) por el ingeniero-inventor alemán Alfred Zein. Y esto fue en 1902. Después de esto, aparecieron con envidiable regularidad los desarrollos de una suspensión electromagnética y de un tren equipado con ella: en 1906, Franklin Scott Smith propuso otro prototipo, entre 1937 y 1941. Herman Kemper recibió varias patentes sobre el mismo tema y, un poco más tarde, el británico Eric Lazewaite creó un prototipo funcional de un motor de tamaño completo. En los años 60, también participó en el desarrollo del aerodeslizador con orugas, que se suponía que se convertiría en el más grande, pero nunca lo fue, porque debido a la financiación insuficiente, el proyecto se cerró en 1973.
Sólo seis años después, también en Alemania, se construyó un tren de levitación magnética que obtuvo la licencia para el transporte de pasajeros. La vía de prueba, instalada en Hamburgo, tenía menos de un kilómetro de largo, pero la idea en sí inspiró tanto al público que el tren funcionó incluso después del cierre de la exposición, logrando transportar a 50 mil personas en tres meses. Su velocidad, según los estándares modernos, no era tan alta: sólo 75 km/h.
No se trataba de una obra maestra, sino de un maglev comercial (como se llamaba al tren propulsado por imanes), que circulaba entre el aeropuerto de Birmingham y la estación de tren desde 1984 y permaneció en servicio durante 11 años. La longitud de la vía era aún más corta, sólo 600 m, y el tren se elevaba 1,5 cm por encima de la vía.

versión japonesa
Posteriormente, el entusiasmo por los trenes de levitación magnética en Europa disminuyó. Pero a finales de los años 90, un país con alta tecnología como Japón se interesó activamente en ellos. En su territorio ya se han trazado varias rutas bastante largas, a lo largo de las cuales vuelan maglevs, utilizando un fenómeno como la levitación magnética. El mismo país también ostenta los récords de velocidad de estos trenes. El último de ellos presentaba un límite de velocidad de más de 550 km/h.
Otras perspectivas de uso
Por un lado, los maglevs son atractivos por su rápida capacidad de movimiento: según los teóricos, en un futuro próximo podrán acelerarse hasta 1.000 kilómetros por hora. Al fin y al cabo, son impulsados por levitación magnética y sólo se frenan por la resistencia del aire. Por tanto, dotar a la composición de las líneas más aerodinámicas posibles reduce enormemente su impacto. Además, debido a que no tocan los raíles, el desgaste de estos trenes es extremadamente lento, lo que resulta muy beneficioso desde el punto de vista económico.
Otra ventaja es la reducción del efecto ruido: los maglevs se mueven casi en silencio en comparación con los trenes convencionales. Una ventaja es también el uso de electricidad en ellos, lo que reduce el impacto nocivo sobre la naturaleza y la atmósfera. Además, es capaz de superar pendientes más pronunciadas, lo que elimina la necesidad de tender vías férreas alrededor de colinas y pendientes.
Aplicaciones energéticas
Una dirección práctica igualmente interesante puede considerarse el uso generalizado de cojinetes magnéticos en componentes clave de los mecanismos. Su instalación soluciona el grave problema del desgaste del material de origen.
Como usted sabe, los rodamientos clásicos se desgastan con bastante rapidez: experimentan constantemente cargas mecánicas elevadas. En algunas zonas, la necesidad de sustituir estas piezas no sólo supone un gasto adicional, sino también un alto riesgo para las personas que mantienen la máquina. permanecen operativos muchas veces más tiempo, por lo que su uso es muy recomendable en condiciones extremas. En particular, en energía nuclear, tecnologías eólicas o industrias acompañadas de temperaturas extremadamente bajas/altas.

Aeronaves
El problema de cómo implementar la levitación magnética plantea una pregunta razonable: ¿cuándo finalmente se fabricará y presentará a la humanidad progresista un avión completo en el que se utilice la levitación magnética? Después de todo, existe evidencia indirecta de que tales "ovnis" existieron. Tomemos, por ejemplo, las "vimanas" indias de la época más antigua o los "aviones de disco" de Hitler, que están más cerca de nosotros en el tiempo y utilizan, entre otras cosas, métodos electromagnéticos para organizar la fuerza de elevación. Se han conservado dibujos aproximados e incluso fotografías de modelos en funcionamiento. La pregunta sigue abierta: ¿cómo hacer realidad todas estas ideas? Pero los inventores modernos aún no han ido más allá de los prototipos poco viables. ¿O tal vez se trata todavía de información demasiado secreta?
¡Aquí te contamos y mostramos cómo hacer un Levitron genial con tus propias manos!
Me vi obligado a montar esta manualidad en la universidad :)
Lo hice junto con un compañero de clase, cuya tarea era hacer un caso loco, y para mí, el relleno electrónico.
Qué bien resultó todo: juzgue usted mismo, escriba comentarios, será interesante leerlo y discutirlo.
No recuerdo exactamente cómo se nos ocurrió la idea de hacer un Levitron, el tema de la artesanía era la forma libre. El diseño parece simple, pero llama la atención.
En general, Levitron en sí es un dispositivo que soporta cualquier objeto en un medio que no entra en contacto con ninguna superficie excepto a través del aire. También funcionará en el vacío.
En este caso, la electrónica hace que el imán flote y el imán ya se puede pegar, por ejemplo, a una lata de una bebida sabrosa y económica :)
Si busca detenidamente en Internet, podrá ver muchas versiones diferentes del Levitron electromagnético, por ejemplo:
Se pueden dividir en suspendidos y repulsivos. Si en el primer caso es necesario simplemente compensar la fuerza de la gravedad, entonces en el segundo también hay un desplazamiento en el plano horizontal, ya que según el teorema de Earnshaw, “cualquier configuración de equilibrio de cargas puntuales es inestable si nada actúa sobre excepto las fuerzas de Coulomb de atracción y repulsión”. - cita de wiki.
De esto se deduce que un levitrón suspendido es más fácil de fabricar y configurar, si es necesario. No quería molestarme demasiado, así que para la universidad hicieron un Levitron colgante, del que se habla aquí, y yo ya hice uno repulsivo para mi amado :) Se escribirá sobre ello en otro artículo. Un poco más tarde eliminaré este texto y le proporcionaré un enlace aquí. Funciona muy bien, pero también tiene sus desventajas.
A su vez, todos los levitrones suspendidos también se pueden dividir en digitales y analógicos según el método para mantener un objeto a la misma distancia. Y según el tipo de sensores, se pueden dividir en ópticos, electromagnéticos, de sonido y, probablemente, todo.
Es decir, recibimos una señal analógica sobre la distancia del imán al Levitron y ajustamos digitalmente la fuerza de influencia sobre el imán. Alta tecnología, sin embargo.
La idea en sí fue tomada del sitio web de Geektimes y la placa de circuito impreso se hizo personalmente para nuestro conjunto de piezas. También en el proyecto original se utilizaron sensores SS49 de tres terminales, pero los plazos fueron muy ajustados, eran, por decirlo suavemente, excesivamente caros ($4 por pieza versus $6 por 10 piezas en China - enlace, por ejemplo), así que Se utilizaron sensores Hall de cuatro terminales. Tuve que cambiar el circuito y hacer adiciones estructurales al dispositivo. Además, para mayor alarde, se agregó un bloque de LED que se encienden suavemente cuando se levanta un imán, es decir, cuando el Levitron comienza a funcionar y se apaga suavemente cuando se retira el imán. Todo esto quedará reflejado en el diagrama.
En realidad, el circuito Levitron con sensores de cuatro terminales:

Y un circuito Levitron con sensores de tres terminales y retroiluminación más sencilla:

El principio de funcionamiento es bastante sencillo. La bobina, que es un electroimán, cuando se aplica energía, atrae el imán: el objeto es atraído. Un sensor colocado entre el imán y la bobina detecta un aumento del flujo magnético, lo que significa que el imán se acerca. La electrónica controla esto y desconecta la bobina de la fuente de voltaje. El imán comienza a caer bajo la influencia de la gravedad. El sensor detecta una disminución en el flujo magnético, que es detectada inmediatamente por la electrónica y se aplica voltaje al electroimán, el imán es atraído - y esto sucede muy a menudo - unas 100 mil veces por segundo. Surge un equilibrio dinámico. El ojo humano no tiene tiempo para darse cuenta de esto. La frecuencia del generador se establece mediante una resistencia y un condensador en los pines 5 y 6 del microcircuito TL494.
Se necesita un segundo sensor en el otro lado del electroimán para compensar el campo magnético creado por la propia bobina. Es decir, si este segundo sensor no existiera, al encender el electroimán el sistema no sería capaz de distinguir la intensidad del campo magnético del imán de neodimio del campo magnético creado por el propio electroimán.
Entonces, tenemos un sistema de dos sensores, cuya señal se envía a un amplificador operacional en una conexión diferencial. Esto significa que en la salida del amplificador operacional sólo aparece la diferencia de voltaje recibida de los sensores.
Por ejemplo. En uno de los sensores el voltaje de salida es de 2,5 V, y en el otro, de 2,6 V. La salida será de 0,1 V. Esta señal diferencial se encuentra en el pin 14 del chip LM324 según el circuito.
Luego, esta señal se envía a los siguientes dos amplificadores operacionales: OP1.1, OP 1.3, cuyas señales de salida pasan a través de una válvula de diodo hasta el pin 4 del chip TL494. Por la válvula de diodo en los diodos D1, D2 pasa solo uno de los voltajes, el que será mayor que el valor nominal. El pin No. 4 del controlador PWM funciona de la siguiente manera: cuanto mayor es el voltaje en este pin, menor es el ciclo de trabajo de los pulsos. La resistencia R9 está diseñada para que, en una situación en la que el voltaje en las entradas de la válvula de diodo sea inferior a 0,6 V, el pin número 4 esté claramente conectado a tierra, mientras que el PWM producirá el ciclo de trabajo máximo.
Volvamos a los amplificadores operacionales OP1.1, OP 1.3. El primero sirve para apagar el controlador PWM mientras el imán está a una distancia suficientemente grande del sensor para que la bobina no funcione al máximo ralentí.
Usando OP 1.3, configuramos la ganancia de la señal diferencial; de hecho, establece la profundidad de la retroalimentación (Feedback). Cuanto más fuerte sea la retroalimentación, más fuerte reaccionará el sistema ante la aproximación del imán. Si la profundidad del sistema operativo no es suficiente, el imán se puede acercar y el dispositivo no comenzará a reducir la potencia bombeada al electroimán. Y si la profundidad del sistema operativo es demasiado grande, entonces el ciclo de trabajo comenzará a disminuir antes de que la fuerza de atracción del imán pueda mantenerlo a esta distancia.
No es necesario instalar la resistencia variable P3; se utiliza para ajustar la frecuencia del generador.
OP1.2 es un generador de voltaje de 2,5 V necesario para sensores de cuatro pines. No es necesario para sensores tipo SS49 de tres pines.
Olvidé mencionar los elementos C1, R6 y R7. Su truco es que la señal constante aquí se corta 10 veces debido a las resistencias, y la señal variable pasa silenciosamente debido al capacitor, logrando así que el circuito se centre en cambios repentinos en la distancia del imán al sensor.
El diodo SD1 está diseñado para suprimir las emisiones inversas cuando se apaga el voltaje del electroimán.
El nodo en T2 le permite encender y apagar suavemente la línea de LED cuando aparecen pulsos en el electroimán.
Pasemos al diseño.
Uno de los puntos clave de Levitron es el electroimán. Hicimos un marco a partir de una especie de perno de construcción, en el que se cortaron lados redondos de madera contrachapada.

El flujo magnético aquí depende de varios factores clave:
- presencia de un núcleo;
- geometría de la bobina;
- corriente de la bobina
En pocas palabras, cuanto más grande es la bobina y mayor es la corriente que fluye por ella, más fuerte atrae los materiales magnéticos.
Como devanado se utilizó alambre PEL de 0,8 mm. Lo enrollaron a ojo hasta que el tamaño de la bobina pareció impresionante. El resultado es el siguiente:


Puede que no sea posible encontrar el cable necesario en nuestra zona, pero es bastante fácil encontrarlo en las tiendas en línea: cable de 0,4 mm para enrollar una bobina.

Mientras se enrollaba la bobina, se preparaba y grababa el tablero. Se realizó utilizando tecnología LUT, el dibujo del tablero se realizó en el programa Sprint LayOut. Puede descargar la placa Levitron desde el enlace.

El tablero fue grabado con restos de persulfato de amonio, cuyo frasco vacío se utilizó con éxito más adelante en este proyecto :)

Me gustaría señalar que la colocación de piezas, así como el enrutamiento de las pistas, implica una soldadura muy cuidadosa, ya que es fácil realizar conexiones donde no deberían estar. Si no tiene esas habilidades, es muy posible hacer esto con componentes grandes en una placa de pruebas, como esta, y hacer conexiones usando cables en el reverso.
Como resultado, el tablero quedó así:


La placa se adaptó de forma muy ergonómica a las dimensiones de la bobina y se fijó directamente a ella mediante un potente adhesivo termofusible, convirtiéndose así en un único monobloque: conecte la alimentación, configúrelo y el sistema funcionará.

Pero todo esto sucedió antes de que el electroimán estuviera listo. La placa se fabricó un poco antes y para probar de alguna manera la funcionalidad del dispositivo, se conectó temporalmente una bobina más pequeña. El primer resultado fue satisfactorio.


Los sensores, como ya se mencionó anteriormente, se utilizan en sistemas de seguimiento de posición de motores BLDC de cuatro pines. Como no fue posible encontrar documentación sobre ellos, tuve que descubrir empíricamente qué pines son responsables de qué. El factor de forma resultó ser:

Mientras tanto llegó un gran electroimán. Esto me dio mucha esperanza :)

Las primeras pruebas con un electroimán grande mostraron una distancia de trabajo bastante grande. Aquí hay una advertencia: el sensor, que está ubicado en el lado del imán de neodimio, debe estar un poco más lejos de la bobina para un funcionamiento confiable de la electrónica.


La última foto se parece más a una especie de satélite espacial. Por cierto, así es exactamente como se podría diseñar este Levitron. Y para aquellos que pretendan repetir diseño, todo está por delante :)

Se decidió utilizar una lata de refresco como objeto levitante. Adjuntamos un imán al frasco con cinta adhesiva de doble cara y lo comprobamos.

Funciona muy bien, en general el dispositivo se puede considerar listo. Lo único que queda es el diseño exterior. Se hizo una viga de soporte con barras y palos; el cuerpo de nuestro monobloque se hizo con la misma lata de plástico vacía de persulfato de amonio. Del monobloque solo salen dos cables para alimentación, como está previsto.

En ese momento, ya se había soldado un circuito para encender suavemente una línea de LED mediante montaje superior, y la línea en sí se montó con éxito sobre el omnipresente adhesivo termofusible.
La fuente de alimentación es una unidad tomada prestada de alguna impresora, convertida de 42 V a 12 V.
También te mostraré la apariencia de la fuente de alimentación :)

A continuación, se hizo un soporte de madera contrachapada, en el que se colocaron la fuente de alimentación y un conector para conectar 220 V. Se pegó una tela en la parte superior para darle belleza, toda la estructura se pintó de amarillo y negro. Se cambió el frasco porque quedó ligeramente abollado durante los experimentos.





De todo esto, además del efecto de levitación, resultó una maravillosa luz nocturna.


Agregaré un video un poco más tarde, pero por ahora, para colmo, quiero decir que mi diseño fue repetido fácilmente por un estudiante de 13 años en mi club de radio.
El aspecto aún no se ha finalizado, pero los componentes electrónicos funcionan como se esperaba. Foto de su diseño:


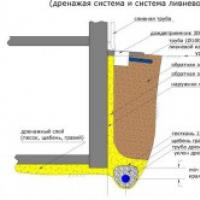 Precio del drenaje de cimientos de pared Materiales y herramientas.
Precio del drenaje de cimientos de pared Materiales y herramientas. Distancia entre el pozo y el pozo negro: estándares SanPiN y SNiP Pozo negro en un edificio de apartamentos
Distancia entre el pozo y el pozo negro: estándares SanPiN y SNiP Pozo negro en un edificio de apartamentos Instalación de la lavadora y conexión al suministro de agua.
Instalación de la lavadora y conexión al suministro de agua. Ajustar el termostato del frigorífico con sus propias manos Termostato casero para frigorífico utilizando elementos discretos
Ajustar el termostato del frigorífico con sus propias manos Termostato casero para frigorífico utilizando elementos discretos Barbacoa: ahumadero de bricolaje con cilindros de gas Ahumadero de bricolaje con cilindro de propano
Barbacoa: ahumadero de bricolaje con cilindros de gas Ahumadero de bricolaje con cilindro de propano Velomóvil para niños de bricolaje: descripción detallada y diagrama
Velomóvil para niños de bricolaje: descripción detallada y diagrama Métodos para soldar alambres de cobre Soldadura por puntos de alambres de cobre.
Métodos para soldar alambres de cobre Soldadura por puntos de alambres de cobre.