Pašdarināta Levitron ķēde. Dari pats platforma Levitron
Īss video par to, kāds ir izgatavotais Levitrons:
www.youtube.com/watch?feature=player_embedded&v=vypjmqq9...
Ja kāds nebaidās darīt to pašu interesantu, tad šeit ir detalizēti norādījumi jums:
Nedaudz teorijas
Sāksim, iespējams, ar platformas Levitron mehānisko shēmu, kas ir izveidojusies manā izpratnē. Īsuma labad es magnētu, kas atrodas virs platformas, nosaukšu par vārdu "mikroshēma".
Levitron platformas skice(iepriekš) ir parādīts attēlā. 1.

Attēlā 2 – vertikālā posma jaudas diagramma pa platformas centrālo asi (kā es to iztēlojos) miera stāvoklī un bez strāvas spolēs. Viss ir kārtībā, izņemot to, ka atpūtas stāvoklis šādā sistēmā ir nestabils. Mikroshēmai ir tendence novirzīties no sistēmas vertikālās ass un spēcīgi uzsist uz vienu no magnētiem. Kad mikroshēma “sajūt” telpu virs magnētiem, virs platformas centra ir jūtams spēka “kupris”, kura augšdaļa atrodas uz centrālās ass.

mg – skaidas svars,
F1 un F2 ir mijiedarbības spēki starp mikroshēmu un platformas magnētiem,
Fmag ir kopējais trieciens, kas līdzsvaro mikroshēmas svaru,
DH – Hall sensori.
Attēlā 3. Tiek attēlota mikroshēmas mijiedarbība ar spolēm (atkal pēc manas izpratnes), un atlikušie spēki ir izlaisti.

No 3. attēla var redzēt, ka spoļu vadības mērķis ir radīt horizontālu spēku Fss, kas vienmēr ir vērsts uz līdzsvara asi, kad notiek pārvietošanās. X. Lai to izdarītu, pietiek ieslēgt spoles, lai tā pati strāva tajās radītu magnētisko lauku pretējā virzienā. Atliek tikai viena maza lieta: izmēra mikroshēmas nobīdi no ass (vērtība X) un nosakiet šīs nobīdes virzienu, izmantojot Hola sensorus, un pēc tam izvadiet strāvas piemērotas stiprības spoles.
Vienkārša elektronisko shēmu atkārtošana nav mūsu tradīcijās, jo īpaši tāpēc, ka:
- divi TDA2030A nav pieejami, bet ir pieejams TDA1552Q;
- nav SS496 Hall sensoru (pieejami aptuveni par 2 USD gabalā), bet ir HW101 līdzīgi sensori, katrā CD vai DVD diskdzinī 3 gab.;
- pārāk slinks, lai mocītos ar bipolāru barošanas avotu.
Datu lapas:
SS496 — http://sccatalog.honeywell.com/pdbdownload/images/ss496.seri...HW101- http://www.alldatasheet.com/datasheet-pdf/pdf/143838/ETC1/HW101A.html
Ķēde sastāv no diviem identiskiem pastiprināšanas kanāliem ar diferenciālām ieejām un tilta izejām. Attēlā 4. attēlā parādīta tikai viena pastiprināšanas kanāla pilna diagramma. Tika izmantotas LM358 (http://www.ti.com/lit/ds/symlink/lm158-n.pdf) un TDA1552Q (http://www.nxp.com/documents/data_sheet/TDA1552Q_CNV.pdf) mikroshēmas.

Katra kanāla ieejai ir pievienots Hall sensoru pāris, lai pastiprinātājam piegādātu atšķirības signālu. Sensoru izejas ir savienotas pretējos virzienos. Tas nozīmē, ka tad, kad sensoru pāris atrodas vienāda stipruma magnētiskajā laukā, pastiprinātāja ieejai tiek piegādāts nulles starpības spriegums.
Balansēšanas rezistori R10 ir daudzkārtu, veci, padomju.
Mēģinot izspiest pietiekami lielu pastiprinājumu no pastiprinātāja, es saņēmu banālu pašizrašanos, iespējams, shēmas plates nekārtības dēļ. “Tīrīšanas” vietā ķēdē tika ieviestas no frekvences atkarīgas RC ķēdes R15C2; tie nav nepieciešami. Ja tomēr vajadzēja tos uzstādīt, tad pretestība R15 jāizvēlas tā, lai tā būtu vislielākā, pie kuras pašiedvesme nodziest.
Strāvas padeve visai ierīcei ir 12V 1,2A adapteris (impulss), kas pārkonfigurēts uz 15V. Enerģijas patēriņš normālā stāvoklī (ar izslēgtu ventilatoru) beidzās diezgan pieticīgs: 210-220 mA.
Dizains
Izvēlētais korpuss ir 3,5” piedziņas korpuss, kas aptuveni atbilst prototipu izmēriem. Lai izlīdzinātu platformu
kājas ir izgatavotas no M3 skrūvēm.
Korpusa augšdaļā ir izgriezts formas caurums, kas labi redzams 5. att. Pēc tam tas tiek pārklāts ar dekoratīvu spoguļa plāksni, kas izgatavota no hromēta misiņa, kas nostiprināta ar cieto disku skrūvēm.

1 – magnētu (apakšā) un līdzsvara indikatoru (pēc izvēles) uzstādīšanas vietas
2 – spoļu “polu gabali”.
3 – Hall sensori
4 - fona apgaismojuma LED (pēc izvēles)
Halles sensori atrodas platformas stikla šķiedras pamatnes caurumos un ir pielodēti uz savienotāju iztaisnotajām kājām (veidu nezinu). Savienotāji izskatījās kā 6. att.

Sensori ir pielodēti no CD vai DVD diskdziņa motoriem. Tur tie atrodas zem rotora malas un ir skaidri redzami 7. att. Vienam kanālam ir jāņem pāris sensoru no viena un tā paša dzinēja - tādā veidā tie būs pēc iespējas identiskāki. Lodētie sensori parādīti 8. att.


Spolēm tika iegādātas plastmasas spoles šujmašīnām, taču pietīšanas vietas nepietika. Pēc tam no spolēm nogrieza vaigus un pielīmēja uz plānsienu misiņa caurules gabaliņiem, kuru ārējais diametrs bija 6 mm un garums 14 mm. Caurule agrāk bija teleskopiskā stieņa antenas segments. Uz četriem šādiem rāmjiem tinumi tiek uztīti ar 0,3 mm stiepli “gandrīz slāni pa slānim” (bez fanātisma!) līdz piepildīšanai. Pretestība ir izlīdzināta uz 13 omi.
Magnēti - taisnstūra 20x10x5 mm un disku magnēti ar diametru 25 un 30 mm, biezums 4 mm (9. att.) - Man vēl bija jāpērk... Zem platformas pamatnes ir uzstādīti taisnstūrveida magnēti, un mikroshēmas ir izgatavotas no disku magnēti.

Ierīces skats no apakšas un no aizmugures (apgriezts uz leju) - attēlā. 10 un 11 (viena leģenda abām figūrām). Nekārtība, protams, ir gleznaina...
U2 TDA1552Q mikroshēma (3) atrodas uz radiatora (9), kas iepriekš strādāja pie videokartes. Pats radiators ir piestiprināts ar skrūvēm pie korpusa augšējā vāka saliektajām daļām. Radiatoram (9) ir arī strāvas kontaktligzda (1), vadības ligzdas (2) un termiskās vadības bloks (5).
Stikla šķiedras gabals, kas agrāk bija tastatūra, kalpo par platformas pamatni. Spoles (7) ir piestiprinātas pie pamatnes ar M4 skrūvēm un uzgriežņiem. Magnēti (6) ir piestiprināti pie tā, izmantojot skavas un pašvītņojošas skrūves.
Testa ligzdas (2) ir izgatavotas no datora barošanas savienotāja un ir piestiprinātas ierīces aizmugurē pie balansēšanas rezistoriem (10), lai tās būtu viegli pieejamas bez demontāžas. Kontaktligzdas, protams, ir pievienotas abu pastiprinātāja kanālu izejām.
Priekšpastiprinātāja ķēde un tā jaudas stabilizators, ieskaitot balansēšanas rezistorus (10), tika uzstādīts uz maizes dēļa un regulēšanas rezultātā pārvērtās par gleznainu cūku kūti, no kuras nācās atturēties no makro fotogrāfiju uzņemšanas.


1 – strāvas kontaktligzdas nostiprināšana
2 – vadības ligzdas
3 – TDA1552Q
4 – strāvas slēdzis
5 – termokontroles bloks
6 – magnēti zem skavām
7 – spoles
8 – magnētiskie šunti
9 – siltuma izlietne
10 – balansējošie rezistori
Uzstādīt
Nulles iestatīšana abu kanālu izejās katru reizi, kad tiek ieslēgta atkļūdošana, ir obligāta. Bez fanātisma: +–20 mV ir diezgan pieņemama precizitāte. Starp kanāliem var būt zināma savstarpēja ietekme, tādēļ, ja sākotnējā novirze ir ievērojama (vairāk nekā 1-1,5 volti pie kanāla izejas), labāk ir iestatīt nulles divas reizes. Der atcerēties, ka ar dzelzs korpusu izjauktas un saliktas ierīces līdzsvars ir divas lielas atšķirības.
Kanāla fāzēšanas pārbaude
Mikroshēma jāpaņem rokā un jānovieto virs ieslēgtā Levitron platformas centra aptuveni 10-12 mm augstumā. Kanāli tiek pārbaudīti pa vienam un atsevišķi. Pārvietojot mikroshēmu ar roku pa līniju, kas savieno sensorus pretī centram, rokai vajadzētu sajust ievērojamu pretestību, ko rada spoļu magnētiskais lauks. Ja pretestība nav jūtama, bet roka ar mikroshēmu ir “aizpūsta” no ass, ir jāapmaina vadi no pārbaudāmā kanāla izejas.
Peldošās mikroshēmas stāvokļa regulēšana
Video par paštaisītu platformu Levitrons bieži var redzēt, ka mikroshēma peld slīpā stāvoklī, pat ja tā ir izgatavota uz diska magnētiem, tas ir, tā ir diezgan labi simetriska. Aprakstītajā dizainā bija daži kropļojumi. Iespējams, pie tā vainojams metāla korpuss...
Pirmā doma: pārvietojiet magnētus uz leju tajā pusē, kur mikroshēma ir pārāk “atbalstīta”.
Otrā doma: pārvietojiet magnētus tālāk no centra tajā pusē, kur mikroshēma ir pārmērīgi “atbalstīta”.
Trešā doma: ja magnēti tiek pārvietoti, tad platformas pastāvīgo magnētu sistēmas magnētiskā ass būs šķība attiecībā pret spoles sistēmas magnētisko asi, kādēļ mikroshēmas uzvedība kļūs neparedzama (īpaši, ja tās svars ir atšķirīgs). ).
Ceturtā ideja: padarīt magnētus stiprākus tajā pusē, kur čips ir sasvērts, tika atmesta kā nereāla, jo nebija kur dabūt plašu magnētu pielikšanai.
Piektā ideja: padarīt magnētus vājākus tajā pusē, kur mikroshēma ir pārāk “atbalstīta”, izrādījās veiksmīga. Turklāt tas ir diezgan vienkārši īstenojams. Magnēts kā magnētiskā lauka avots var tikt šunts, tas ir, daļa magnētiskās plūsmas var tikt īssavienota, tā ka magnētiskais lauks apkārtējā telpā kļūst nedaudz vājāks. Kā magnētiskie šunti tika izmantoti nelieli ferīta gredzeni (10x6x3, 8x4x2 utt.), kas brīvi izvilkti no nedzīvām telpu taupīšanas spuldzēm (8 10. att.). Šie gredzeni vienkārši ir jāmagnetizē ar pārāk spēcīgu magnētu (vai diviem vai trim) tajā pusē, kas atrodas vistālāk no platformas centra. Izrādījās, ka katram “pārāk spēcīgam” magnētam izvēloties šuntu skaitu un izmērus, var diezgan precīzi nolīdzināt peldošās simetriskās mikroshēmas pozīciju. Atcerieties veikt elektrisko balansēšanu pēc katras izmaiņas magnētiskajā sistēmā!
Iespējas
Iespējas ietver: pastiprinātāja nelīdzsvarotības indikatorus, siltuma vadības bloku, fona apgaismojumu un regulējamas platformas kājas.
Pastiprinātāja nelīdzsvarotības indikatori ir divi gaismas diožu pāri, kas atrodas tajos pašos rādiusos kā sensori, dziļi platformas stikla šķiedras pamatnē (1. 5. att.). Gaismas diodes, ļoti mazas un plakanas, kādreiz darbojās kaut kādā modemā, taču tās darbosies arī no veca mobilā telefona (SMD versijā). Gaismas diodes ir iegremdētas caurumos, jo mikroshēma, krītot no centra, uzkrīt uz tuvākā magnēta un ir diezgan spējīga iznīcināt LED.
Indikatora diagramma vienam kanālam ir parādīta attēlā. 12. Gaismas diodes darba spriegumam jābūt 1,1-1,2 V, t.i. vienkārša sarkana, oranža, dzeltena. Pie augstākiem LED spriegumiem (2,9–3,3 V īpaši spilgtām) ir jāpārrēķina diožu skaits ķēdē D3-D6, lai samazinātu “mirušo zonu” - minimālo spriegumu kanāla izejā, kurā neviena no gaismas diodēm nedeg. spīd.

Es novietoju indikatorus tā, lai tas, uz kuru mikroshēma ir novirzīta no centra, spīd. Indikatori palīdz viegli pakārt mikroshēmu virs Levitron, kā arī izlīdzināt platformu. Normālā stāvoklī tie visi ir dzēsti.
Termiskās vadības bloka shēma ir parādīta attēlā. 13. Tā mērķis ir novērst gala pastiprinātāja pārkaršanu. Pie termobloka izejas tiek ieslēgts 50x50 mm 12V 0,13A ventilators no datora.

Termiskās vienības shēmā ir viegli atpazīt nedaudz modificētu Schmitt sprūdu. Pirmā tranzistora vietā tika izmantota TL431 mikroshēma. Tranzistora Q1 tips ir norādīts nosacīti - pieslēdzu pirmo sastapto NPN, kas varēja izturēt ventilatora darba strāvu. Kā temperatūras sensors tika izmantots termistors, kas atradās uz vecās mātesplates procesora ligzdā. Temperatūras sensors ir pielīmēts pie gala pastiprinātāja radiatora. Izvēloties rezistoru R1, var regulēt termobloku darbam 50-60C temperatūrā. Rezistors R5 kopā ar kolektora strāvu Q1 nosaka ķēdes histerēzes apjomu attiecībā pret spriegumu vadības ieejā U1.
Diagrammā attēlā. 13, tiek ieviests rezistors R7, lai samazinātu ventilatora spriegumu un attiecīgi no tā radīto troksni.
Attēlā 14 varat redzēt, kā ventilators ir iestrādāts korpusa apakšējā vākā.

Vēl viens veids, kā izmantot termisko bloku, ir savienot gala pastiprinātāja mikroshēmu ar MUTE vadības tapu (15. att.). Diagrammā norādītā R5 vērtības vērtība pieņem, ka MUTE (U2 mikroshēmas 11. kontakts 4. attēlā) ir pievienots barošanas avotam caur 1 kOhm rezistoru (NAV tieši, kā datu lapā!). Šajā gadījumā ventilators nav nepieciešams. Tiesa, pieliekot MUTE signālu pastiprinātājam, mikroshēma nokrīt, un pēc MUTE signāla noņemšanas tas (nez kāpēc?) nepaceļas.

Fona apgaismojums – 4 spilgtas gaismas diodes ar diametru 3 mm, kas atrodas slīpi pret centru platformas un dekoratīvās plāksnes pamatnes atverēs tajās vietās, kur mikroshēma nekrīt. Tie ir savienoti virknē un caur 150 omu rezistoru ar 15 V ierīces vispārējo barošanas ķēdi.
Secinājums
Kravnesība
Lai “beigtu” tēmu, Levitron ar šķembām 25 un 30 mm diametrā tika noņemti “kravas raksturlielumi”. Šeit es nosaucu kravas raksturlielumus virs platformas (no dekoratīvās plāksnes) slīdošās mikroshēmas augstuma atkarību no mikroshēmas kopējā svara.
Mikroshēmai ar 25 mm magnētu un kopējo svaru 19 g maksimālais augstums bija 16 mm, bet minimālais – 8 mm ar svaru 38 g. Starp šiem punktiem raksturlielums ir gandrīz lineārs. Mikroshēmai ar 30 mm magnētu slodzes raksturlielums izrādījās starp punktiem 16 mm pie 24 g un 8 mm pie 48 g.
No augstuma zem 8 mm no platformas mikroshēma nokrīt, pievelkot spoļu dzelzs serdeņus.
NEdari tā, kā es!
Pirmkārt, jums nevajadzētu taupīt uz sensoriem. “Kalie” Hall sensori, kas katram kanālam izņemti pa pāriem no diviem dzinējiem (tas ir, gandrīz identiski!) - joprojām uzrāda savu nežēlīgi lielo temperatūras pretestības koeficientu. Pat ar vienādām strāvas ķēdēm un pretdiferenciālo sensoru izeju savienojumu, mainoties temperatūrai, kanāla izejā var iegūt ievērojamu nulles nobīdi. Integrētajiem sensoriem SS496 (SS495) ir ne tikai iebūvēts pastiprinātājs, bet arī termiskā stabilizācija. Iekšējais sensora pastiprinātājs padarīs kanālu kopējo pastiprinājumu ievērojami lielāku, un to barošanas ķēde būs vienkāršāka.
Otrkārt, ja iespējams, jums vajadzētu atturēties no Levitron ievietošanas dzelzs apvalkā.
Treškārt, vēlams ir bipolārais barošanas avots, jo pastiprinājuma kontrole un nulles regulēšana ir vienkāršāka.
Paldies par jūsu uzmanību!
Levitrons, kā zināms, ir augšdaļa, kas rotē gaisā virs kastes, kurā darbojas magnētiskā lauka avots. Jūs varat izgatavot Levitron no populāra zāles sensora.
Kas ir Levitron
UZMANĪBU! Ir atrasts pavisam vienkāršs veids, kā samazināt degvielas patēriņu! Netici man? Arī automehāniķis ar 15 gadu pieredzi tam neticēja, kamēr neizmēģināja. Un tagad viņš ietaupa 35 000 rubļu gadā uz benzīnu!
Levitron ir rotaļlieta. Nav jēgas to iegādāties, ja zināt paštaisītas ierīces izgatavošanas iespējas. Šāda Levitron konstrukcijā nebūs nekas sarežģīts, ja ir parasts zāles sensors, piemēram, iegādāts automašīnu izplatītājam un atstāts turpmākai lietošanai.
Jums jāzina, ka levitācijas efekts vienmēr tiek novērots diezgan šaurā zonā. Šādas realitātes zināmā mērā ierobežo amatnieku rīcības brīvību, tomēr ar pacietību un laiku jūs vienmēr varat uzstādīt Levitron efektīvi un produktīvi. Tas praktiski nekritīs un nelēks.
Levitrons no halles sensora
Levitron zāles sensoram un tā izgatavošanas ideja ir vienkārša, tāpat kā viss ģeniālais. Pateicoties magnētiskā lauka spēkam, jebkura materiāla gabals ar elektromagnētiskām īpašībām paceļas gaisā.

Lai radītu gaisā peldošas “lidošanas” efektu, savienojums tiek veikts ar augstu frekvenci. Citiem vārdiem sakot, šķiet, ka magnētiskais lauks paceļ un izmet materiālu.
Ierīces dizains ir pārāk vienkāršs, un pat skolēns, kurš nav veltīgi nosēdējis fizikas stundas, visu varēs uzbūvēt pats.
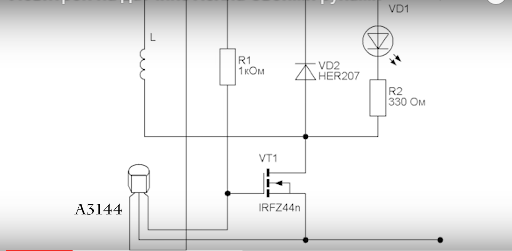
- Jums ir nepieciešams LED (tā krāsa tiek izvēlēta atkarībā no individuālajām vēlmēm).
- Tranzistori RFZ 44N (lai gan der jebkura lauka ierīce, kas ir tuvu šiem parametriem).
- Diode 1N 4007.
- Rezistori 1 kOhm un 330 Ohm.
- Faktiski pats zāles sensors (A3144 vai cits).
- Vara tinumu stieple ar izmēru 0,3-0,4 mm (pietiks ar apmēram 20 metriem).
- Neodīma magnēts tabletes formā 5x1 mm.
- 5 voltu lādētājs, kas paredzēts mobilajiem tālruņiem.
Tagad sīkāk par to, kā tiek veikta montāža:
- Elektromagnēta rāmis ir izgatavots ar tieši tādiem pašiem parametriem kā fotoattēlā. 6 mm ir diametrs, apmēram 23 mm ir tinuma garums, 25 mm ir vaigu diametrs ar rezervi. Rāmis ir izgatavots no kartona un parastās piezīmju grāmatiņas lapas, izmantojot superlīmi.

- Vara stieples gals ir piestiprināts pie ruļļa un pēc tam uztīts (apmēram 550 apgriezieni). Nav nozīmes tam, kādā virzienā tu to vītu. Arī otrs vada gals ir fiksēts, spole pagaidām nolikta malā.
- Visu lodējam pēc shēmas.
- Halles sensors tiek pielodēts uz vadiem un pēc tam novietots uz spoles. Jums tas jāievieto spoles iekšpusē un jānostiprina ar improvizētiem līdzekļiem.
Uzmanību. Sensora jutīgajai zonai (to var noteikt no zāles sensora dokumentācijas) vajadzētu izskatīties paralēli zemei. Tāpēc pirms sensora ievietošanas spolē ieteicams šo vietu nedaudz saliekt.

- Spole ir piekārta un tai tiek piegādāta strāva caur iepriekš pielodētu dēli. Spole tiek fiksēta, izmantojot statīvu.

Tagad jūs varat pārbaudīt, kā Levitron darbojas. Jebkuru elektrificētu materiālu var nogādāt spolē no apakšas. Atkarībā no polaritātes tas tiks piesaistīts spolei vai atgrūsts. Bet mums ir vajadzīgs materiāls, kas karājas gaisā, peld. Tas notiks, ja materiāla forma nav pārāk maza attiecībā pret spoli.
Piezīme. Ja planšetdatora formas magnēts ir mazs, tad tas nelevitē īpaši efektīvi. Tas var nokrist. Lai novērstu kļūdas darbā, materiāla smaguma centrs ir jāpārvieto uz leju - parastais papīra gabals derēs kā slodze.
Kas attiecas uz LED, jums tas nav jāinstalē. No otras puses, ja vēlaties lielāku efektu, varat organizēt šovu ar apgaismojumu.
Pašdarināts Levitron klasiskā versijā bez sensora
Kā redzat, pateicoties halles sensora klātbūtnei, bija iespējams izgatavot diezgan iespaidīgu rotaļlietu. Taču tas nebūt nenozīmē, ka to nevar izdarīt bez sensora. Gluži pretēji, mājās gatavots Levitron klasiskajā versijā ir tikai liels magnēts no skaļruņa (13-15 cm diametrā) un neliels gredzena magnēts augšpusē (2-3 cm diametrā), neizmantojot sensoru.
Augšdaļas ass parasti ir izgatavota no vecas pildspalvas vai zīmuļa. Galvenais, lai stienis būtu izvēlēts tā, lai tas cieši iegultos gredzena magnēta centrā. Pēc tam nogriež lieko roktura daļu (apmēram 10 cm garumā kopā ar piestiprināto magnētu augšai, kas ir tas, kas jums nepieciešams).
Klasiskā Levitron ražošanas shēma ietver arī duci dažādu paplāksņu, kas izgrieztas no bieza papīra. Priekš kam tās vajadzīgas? Ja iepriekš aprakstītajā gadījumā tika izmantots arī papīrs, un kā atceramies - smaguma centra nobīdīšanai uz leju vai, vienkāršāk sakot, regulēšanai. Šeit ir tas pats. Ideālai augšdaļas regulēšanai būs nepieciešamas paplāksnes (ja nepieciešams, tās novieto aiz gredzena magnēta uz stieņa).

Uzmanību. Lai paštaisīts tops nevainojami levitētu, papildus regulēšanai ar paplāksnēm ir nepieciešams nekļūdīties ar polaritāti. Citiem vārdiem sakot, uzstādiet gredzena magnētu koaksiāli ar lielo magnētu.

Bet tas vēl nav viss. Gan pirmajā gadījumā (izmantojot halles sensoru), gan otrajā ir jāpanāk ideāls pievilkšanas avota vienmērīgums. Citiem vārdiem sakot, novietojiet lielu magnētu uz pilnīgi līdzenas virsmas. Lai to panāktu, tiek izmantoti dažāda biezuma koka statīvi. Ja magnēts nestāv vienā līmenī, statīvus novieto vienā vai vairākās pusēs, tādējādi regulējot vienmērīgumu.
Platforma Levitrons
Levitron platformas shēma parasti atšķiras ar nevis viena, bet vairāku avota magnētu klātbūtni. Šajā gadījumā materiāls vai virsma, kas peld gaisā, mēdz nokrist uz kāda no magnētiem, novirzoties no vertikālās ass. Lai no tā izvairītos, jums ir jāspēj noregulēt centrālo pievilkšanas zonu un darīt to pilnīgi precīzi.
Un šeit palīgā nāk tās pašas spoles, kurās ir ievietots zāles sensors. Lai ir divas šādas spoles, un tās jānovieto tieši platformas vidū, starp magnētiem. Diagrammā tas izskatīsies šādi (1 un 2 ir magnēti).

No diagrammas kļūst skaidrs, ka spoļu vadības mērķis ir radīt horizontālu spēku, smaguma centru. Šo spēku formāli sauc par Fss, un tas ir vērsts uz līdzsvara asi, kad notiek nobīde, kas diagrammā norādīta kā X.
Ja spoles savienojat tā, lai impulss izveidotu zonu ar apgrieztu polaritāti, problēmu var atrisināt ar nobīdi. Jebkurš fiziķis to apstiprinās.
Jebkurš vecs DVD atskaņotājs var tikt izmantots kā korpuss platformas Levitron dizainam. No tā tiek izņemtas visas “iekšdaļas”, uzstādīti magnēti un spoles, kā arī skaistuma nolūkos augšdaļa ir aizvērta ar praktisku vāku no plāna, iespējams, caurspīdīga materiāla (magnētisko lauku caurlaidīga).
Halles sensoriem ir jābūt izvirzītiem caur platformas caurumiem, un tiem jābūt pielodētiem uz savienotāju iztaisnotajām kājām.
Kas attiecas uz magnētiem, tie var būt apaļi elementi, kuru biezums ir 4 mm. Vēlams, lai viens no magnētiem diametrā būtu lielāks par otro. Piemēram, 25 un 30 mm.
Ir arī sarežģītākas Levitrons versijas, kas izgatavotas saskaņā ar topu vērpšanas shēmu, kas atrodas neliela globusa iekšpusē. Šos Levitronus var uzbūvēt arī izmantojot Hall sensorus – efektīvus komponentus, kas ir veikuši veselu revolūciju automobiļu rūpniecībā un citās cilvēka darbības jomās.
Šīs apmācības ideju iedvesmoja Kickstarter kopfinansēšanas platformas projekts ar nosaukumu “Air Bonsai”, kas ir patiešām skaists un noslēpumains japāņu projekts.
Bet jebkuru noslēpumu var izskaidrot, ja paskatās iekšā. Tā patiesībā ir magnētiskā levitācija, kur atrodas objekts, kas levitē no augšas, un elektromagnēts, ko kontrolē ķēde. Mēģināsim kopīgi īstenot šo noslēpumaino projektu.

Mēs noskaidrojām, ka Kickstarter ierīces dizains bija diezgan sarežģīts, bez jebkāda mikrokontrollera. Nevarēja atrast tā analogo shēmu. Patiesībā, ja paskatās uzmanīgāk, levitācijas princips ir diezgan vienkāršs. Jums ir jāizgatavo magnētiskā daļa, kas “peld” virs citas magnētiskās daļas. Galvenais turpmākais darbs bija nodrošināt, lai levitējošais magnēts nenokristu.
Ir arī notikušas spekulācijas, ka to izdarīt ar Arduino patiesībā ir daudz vieglāk nekā mēģināt izprast japāņu ierīces shēmu. Patiesībā viss izrādījās daudz vienkāršāk.
Magnētiskā levitācija sastāv no divām daļām: pamatdaļas un peldošās (levitējošās) daļas.
Bāze
Šī daļa atrodas apakšā, kas sastāv no magnēta, lai izveidotu apļveida magnētisko lauku, un elektromagnētiem, lai kontrolētu šo magnētisko lauku.
Katram magnētam ir divi stabi: ziemeļu un dienvidu. Eksperimenti liecina, ka pretstati pievelk un kā stabi atgrūž. Četri cilindriski magnēti ir novietoti kvadrātā, un tiem ir tāda pati polaritāte, veidojot apļveida magnētisko lauku uz augšu, lai izspiestu jebkuru magnētu, kuram starp tiem ir vienāds pols.
Kopumā ir četri elektromagnēti, tie ir novietoti kvadrātā, divi simetriski magnēti ir pāris, un to magnētiskais lauks vienmēr ir pretējs. Hall efekta sensors un ķēde kontrolē elektromagnētus. Mēs izveidojam pretējos elektromagnētu polus, laižot caur tiem strāvu.
Peldošā daļa
Daļā ir iekļauts magnēts, kas peld virs pamatnes, kurā var pārvadāt nelielu augu podu vai citus priekšmetus.
Augšpusē esošo magnētu paceļ apakšējo magnētu magnētiskais lauks, jo tiem ir vienādi stabi. Tomēr, kā likums, tas mēdz krist un piesaistīt viens otru. Lai novērstu magnēta augšdaļas apgriešanos un krišanu, pateicoties Hall efekta sensoram, elektromagnēti radīs magnētiskos laukus, lai stumtu vai vilktu, lai līdzsvarotu peldošo daļu. Elektromagnētus kontrolē divas asis X un Y, kā rezultātā augšējais magnēts tiek saglabāts līdzsvarots un peldošs.
Elektromagnētu vadīšana nav vienkārša, un tam ir nepieciešams PID regulators, kas ir detalizēti apspriests nākamajā darbībā.
2. darbība: PID kontrolieris (PID)

No Vikipēdijas: “Proporcionālais-integrālais-atvasinātais (PID) regulators ir ierīce vadības lokā ar atgriezenisko saiti.To izmanto automātiskās vadības sistēmās, lai ģenerētu vadības signālu, lai iegūtu nepieciešamo pārejas procesa precizitāti un kvalitāti. PID regulators ģenerē vadības signālu, kas ir trīs terminu summa, no kuriem pirmais ir proporcionāls starpībai starp ieejas signālu un atgriezeniskās saites signālu (neatbilstības signāls), otrais ir nesakritības signāla integrālis, trešais ir neatbilstības signāla atvasinājums."
Vienkārši izsakoties: “PID regulators aprēķina “kļūdas” vērtību kā starpību starp izmērīto [Input] un vēlamo iestatījumu. Kontrolieris mēģina samazināt kļūdu, pielāgojot [izeju].
Tātad jūs norādāt PID, ko mērīt (ievade), kādu vērtību vēlaties un mainīgo, kas palīdzēs iegūt šo vērtību kā izvadi. Pēc tam PID regulators pielāgo izeju, lai ieeja būtu vienāda ar iestatījumu.
Piemēram: Automašīnā mums ir trīs vērtības (Input, Setup, Output) būs attiecīgi ātrums, vēlamais ātrums un gāzes pedāļa leņķis.
Šajā projektā:
- Ievade ir pašreizējā reāllaika vērtība no halles sensora, kas tiek nepārtraukti atjaunināta, jo peldošā magnēta pozīcija mainīsies reāllaikā.
- Iestatītā vērtība ir halles sensora vērtība, kas tiek mērīta, kad peldošais magnēts atrodas līdzsvara stāvoklī, magnēta pamatnes centrā. Šis indekss ir fiksēts un laika gaitā nemainās.
- Izejas signāls ir ātrums, lai kontrolētu elektromagnētus.
Paldies Arduino kopienai par PID bibliotēkas uzrakstīšanu, kuru ir ļoti viegli lietot. Plašāka informācija par Arduino PID ir pieejama oficiālajā Arduino vietnē. Arduino sistēmā mums ir jāizmanto pāris PID kontrolieri, viens X asij un otrs Y asij.
3. darbība. Piederumi

Nodarbības sastāvdaļu saraksts izrādās pienācīgs. Zemāk ir saraksts ar komponentiem, kas jums jāiegādājas šim projektam. Pirms sākat, pārliecinieties, vai jums ir viss. Dažas sastāvdaļas ir ļoti populāras, un jūs, visticamāk, tās atradīsit savā noliktavā vai mājās.

4. darbība. Rīki
Šeit ir saraksts ar visbiežāk izmantotajiem rīkiem:
- Lodāmurs
- Rokas zāģis
- Multimetrs
- Urbt
- Osciloskops (pēc izvēles, varat izmantot multimetru)
- Sols urbis
- Karstā līme
- Knaibles
5. darbība: LM324 op-amp, L298N draiveris un SS495a

LM324 Op-amp
Operacionālie pastiprinātāji (operācijas pastiprinātāji) ir viena no vissvarīgākajām, plaši izmantotajām un daudzpusīgākajām shēmām, kas mūsdienās tiek izmantotas.
Hallas sensora signāla pastiprināšanai izmantojam darbības pastiprinātāju, kura mērķis ir palielināt jutību, lai Arduino varētu viegli noteikt magnētiskā lauka izmaiņas. Dažu mV izmaiņas halles sensora izejā pēc pastiprinātāja izlaišanas Arduino var mainīties par vairākiem simtiem vienību. Tas ir nepieciešams, lai nodrošinātu vienmērīgu un stabilu PID regulatora darbību.
Mūsu izvēlētais parastais darbības pastiprinātājs ir LM324, tas ir lēts, un to varat iegādāties jebkurā elektronikas veikalā. LM324 ir 4 iekšējie pastiprinātāji, kas ļauj to izmantot elastīgi, tomēr šajā projektā ir nepieciešami tikai divi pastiprinātāji: viens X asij un otrs Y asij.
L298N modulis
L298N Dual H-Bridge parasti izmanto, lai kontrolētu divu līdzstrāvas motoru ātrumu un virzienu, vai arī viegli piedzen vienu bipolāru pakāpju motoru. L298N var izmantot ar motoriem no 5 līdz 35 V līdzstrāvas.
Ir arī iebūvēts 5V regulators, tādēļ, ja barošanas spriegums ir līdz 12V, var pieslēgt arī 5V barošanas avotu no plates.
Šis projekts izmanto L298N, lai vadītu divus elektromagnētu spoļu pārus, un izmanto 5 V izeju, lai darbinātu Arduino un Hall sensoru.
Moduļa spraudnis:
- 2. izvads: elektromagnētu pāris X
- 3. izvads: Y solenoīda pāris
- Ieejas jauda: DC 12V ieeja
- GND: Zeme
- 5v izeja: 5v Arduino un Hall sensoriem
- EnA: iespējo PWM signālu 2. izejai
- In1: iespējot 2. izvadei
- In2: iespējot 2. izejai
- In3: iespējot 3. izvadei
- In4: iespējot 3. izvadei
- EnB: iespējo PWM signālu Out3
Savienojuma izveide ar Arduino: mums ir jānoņem 2 džemperi EnA un EnB tapās, pēc tam pievienojiet 6 tapas In1, In2, In3, In4, EnA, EnB ar Arduino.
SS495a zāles sensors
SS495a ir lineārs Hall sensors ar analogo izeju. Lūdzu, ņemiet vērā atšķirību starp analogo izvadi un digitālo izvadi, šajā projektā nevar izmantot sensoru ar digitālo izvadi, tam ir tikai divi stāvokļi 1 vai 0, tāpēc jūs nevarat izmērīt magnētisko lauku izvadi.
Analogais sensors radīs sprieguma diapazonu no 250 līdz Vcc, ko varat nolasīt, izmantojot Arduino analogo ieeju. Lai izmērītu magnētisko lauku gan X, gan Y asī, ir nepieciešami divi Hall sensori.
6. darbība: NdFeB (neodīma dzelzs bora) neodīma magnēti

No Vikipēdijas: "Neodīms ir ķīmisks elements, retzemju metāls sudrabbaltā krāsā ar zeltainu nokrāsu. Pieder lantanīdu grupai. Viegli oksidējas gaisā. 1885. gadā atklāja austriešu ķīmiķis Karls Auers fon Velsbahs. Izmantots kā Alumīnija un magnija sakausējumu sastāvdaļa lidmašīnām un raķešu zinātnei."
Neodīms ir feromagnētisks metāls (konkrēti, tam piemīt antiferomagnētiskas īpašības), kas nozīmē, ka, tāpat kā dzelzi, to var magnetizēt, lai kļūtu par magnētu. Bet tā Kirī temperatūra ir 19 K (-254 °C), tāpēc tā tīrais magnētisms parādās tikai ārkārtīgi zemās temperatūrās. Tomēr neodīma savienojumiem ar pārejas metāliem, piemēram, dzelzi, Kirī temperatūra var būt krietni augstāka par istabas temperatūru, un tos izmanto neodīma magnētu izgatavošanai.
Spēcīgs ir vārds, ko lieto, lai aprakstītu neodīma magnētu. Jūs nevarat izmantot ferīta magnētus, jo to magnētisms ir pārāk vājš. Neodīma magnēti ir daudz dārgāki nekā ferīta magnēti. Pamatnei izmantoti mazi magnēti, peldošajai/levitējošajai daļai lielie magnēti.
Uzmanību! Lietojot neodīma magnētus, jābūt uzmanīgiem, jo to spēcīgais magnētisms var jums kaitēt vai arī tie var sabojāt datus jūsu cietajā diskā vai citās elektroniskās ierīcēs, kuras ietekmē magnētiskie lauki.
Padoms! Jūs varat atdalīt divus magnētus, velkot tos horizontāli, jūs nevarat tos atdalīt pretējā virzienā, jo to magnētiskais lauks ir pārāk spēcīgs. Tie ir arī ļoti trausli un viegli saplīst.
7. solis: pamatnes sagatavošana

Mēs izmantojām nelielu terakotas podiņu, ko parasti izmanto, lai audzētu sukulentu vai kaktusu. Varat arī izmantot keramikas podu vai koka podu, ja tie ir piemēroti. Izmantojiet 8 mm urbi, lai katla apakšā izveidotu caurumu, ko izmanto, lai turētu līdzstrāvas kontaktligzdu.
8. darbība. Peldošās daļas 3D drukāšana

Ja jums ir 3D printeris, tas ir lieliski. Jums ir iespēja ar to darīt visu. Ja jums nav printera, neesiet izmisumā, jo... varat izmantot lētu 3D drukas pakalpojumu, kas šobrīd ir ļoti populārs.
Lāzergriešanai faili ir arī augstāk esošajā arhīvā - failā AcrylicLaserCut.dwg (tas ir autocad). Akrila daļa tiek izmantota magnētu un elektromagnētu atbalstam, pārējā daļa tiek izmantota terakotas poda virsmas segšanai.
9. darbība. Sagatavojiet SS495a zāles sensora moduli


Izgrieziet PCB izkārtojumu divās daļās, vienu daļu, lai piestiprinātu zāles sensoru, un otru, lai pievienotu LM324 ķēdi. Pievienojiet divus magnētiskos sensorus perpendikulāri PCB. Izmantojiet plānus vadus, lai savienotu abus VCC sensoru tapas, rīkojieties tāpat ar GND tapām. Izvades kontakti ir atsevišķi.
10. darbība. Op-amp ķēde
Pielodējiet kontaktligzdu un rezistorus pie PCB, ievērojot diagrammu, pievēršot uzmanību abu potenciometru novietošanai vienā virzienā, lai vēlāk būtu vieglāk kalibrēt. Pievienojiet LM324 kontaktligzdai, pēc tam pievienojiet abas zāles sensora moduļa izejas operētājsistēmas pastiprinātāja ķēdei.
Savienojiet divus LM324 izejas vadus ar Arduino. 12V ieeja ar 12V L298N moduļa ieeju, 5V moduļa L298N izeja uz 5V potenciometru.
11. darbība: elektromagnētu salikšana
Salieciet elektromagnētus uz akrila loksnes, tie ir piestiprināti četros caurumos centra tuvumā. Pievelciet skrūves, lai izvairītos no kustībām. Tā kā elektromagnēti centrā ir simetriski, tie vienmēr atrodas pretējos polios, tāpēc elektromagnētu iekšpusē esošie vadi ir savienoti kopā, bet elektromagnētu ārpuses vadi ir savienoti ar L298N.
Izvelciet vadus zem akrila loksnes caur blakus esošajiem caurumiem, lai izveidotu savienojumu ar L298N. Vara stieple ir pārklāta ar izolētu slāni, tāpēc pirms lodēšanas tās ir jānoņem ar nazi.
12. darbība: Sensora modulis un magnēti
Izmantojiet karsto līmi, lai piestiprinātu sensora moduli starp elektromagnētiem, ņemiet vērā, ka katram sensoram jābūt kvadrātveida ar diviem elektromagnētiem, vienam priekšpusē un otram aizmugurē. Mēģiniet kalibrēt abus sensorus pēc iespējas centrāli, lai tie nepārklātos, tādējādi sensors būs visefektīvākais.
Nākamais solis ir akrila magnētu salikšana. Apvienojot divus D15 * 4 mm magnētus un D15 * 3 mm magnētu kopā, lai izveidotu cilindru, magnētu un elektromagnētu augstums būs vienāds. Salieciet magnētus starp elektromagnētu pāriem, ņemiet vērā, ka augšupejošo magnētu poliem jābūt vienādiem.
13. darbība. Līdzstrāvas ligzda un L298N 5 V izeja

Lodējiet līdzstrāvas kontaktligzdu ar diviem vadiem un izmantojiet termosarukuma caurules. Savienojot līdzstrāvas barošanas ligzdu ar moduļa L298N ieeju, tā 5 V izeja piegādās strāvu Arduino.
14. darbība: L298N un Arduino

Savienojiet L298N moduli ar Arduino, ievērojot iepriekš minēto diagrammu:
L298N → Arduino
5V → VCC
GND → GND
EnA → 7
B1 → 6
B2 → 5
B3 → 4
B4 → 3
EnB → 2

15. darbība: Arduino Pro Mini programmētājs

Tā kā Arduino pro mini nav USB uz seriālo portu, jums ir jāpievieno ārējs programmētājs. FTDI Basic tiks izmantots Pro Mini programmēšanai (un barošanai).
Kā zināms, Zemei pašreizējās pasaules kārtības dēļ ir noteikta, un cilvēka sapnis vienmēr ir bijis to pārvarēt ar jebkādiem līdzekļiem. Magnētiskā levitācija ir daudz fantastisks termins nekā tas, kas attiecas uz ikdienas realitāti.
Sākotnēji tas nozīmēja hipotētisku spēju kaut kā pārvarēt gravitāciju un pārvietot cilvēkus vai priekšmetus pa gaisu bez palīgiekārtām. Tomēr tagad jēdziens “magnētiskā levitācija” jau ir diezgan zinātnisks.
Uzreiz tiek izstrādātas vairākas inovatīvas idejas, kuru pamatā ir šī parādība. Un tie visi sola lieliskas iespējas daudzpusīgiem lietojumiem nākotnē. Tiesa, magnētiskā levitācija netiks veikta ar maģiskiem paņēmieniem, bet gan izmantojot ļoti specifiskus fizikas sasniegumus, proti, sadaļu, kas pēta magnētiskos laukus un visu, kas ar tiem saistīts.
Tikai nedaudz teorijas
Starp cilvēkiem, kas ir tālu no zinātnes, pastāv uzskats, ka magnētiskā levitācija ir magnēta vadīts lidojums. Faktiski šis termins nozīmē gravitācijas pārvarēšanu, izmantojot objektu, izmantojot magnētisko lauku. Viena no tās īpašībām ir magnētiskais spiediens, ko izmanto gravitācijas “cīņai”.
Vienkārši sakot, kad gravitācija velk objektu uz leju, magnētiskais spiediens tiek virzīts tā, lai tas stumtu to pretējā virzienā – uz augšu. Tādā veidā notiek magnēta levitācija. Grūtības teorijas īstenošanā ir tādas, ka statiskais lauks ir nestabils un nefokusējas noteiktā punktā, tāpēc tas var nespēt efektīvi pretoties gravitācijai. Tāpēc ir nepieciešami palīgelementi, kas nodrošinās magnētiskā lauka dinamisko stabilitāti, lai magnēta levitācija būtu regulāra parādība. Kā stabilizatori tiek izmantoti dažādi paņēmieni. Visbiežāk - elektriskā strāva caur supravadītājiem, taču šajā jomā ir arī citi sasniegumi.

Tehniskā levitācija
Faktiski magnētiskā daudzveidība attiecas uz plašāku terminu gravitācijas pievilcības pārvarēšanai. Tātad, tehniskā levitācija: metožu apskats (ļoti īss).
Šķiet, ka esam mazliet izdomājuši ar magnētisko tehnoloģiju, taču ir arī elektriskā metode. Atšķirībā no pirmā, otro var izmantot, lai manipulētu ar izstrādājumiem, kas izgatavoti no dažādiem materiāliem (pirmajā gadījumā tikai magnetizētiem), pat ar dielektriķiem. Izšķir arī elektrostatisko un elektrodinamisko levitāciju.
Daļiņu spēju pārvietoties gaismas ietekmē prognozēja Keplers. Un esamību pierādīja Ļebedevs. Daļiņas kustību gaismas avota virzienā (optisko levitāciju) sauc par pozitīvo fotoforēzi, bet pretējā virzienā - par negatīvu.

Aerodinamiskā levitācija, kas atšķiras no optiskās, ir diezgan plaši pielietojama mūsdienu tehnoloģijās. Starp citu, “spilvens” ir viena no tā šķirnēm. Vienkāršākais gaisa spilvens tiek iegūts ļoti vienkārši - nesēja substrātā tiek izurbti daudzi caurumi un caur tiem tiek izpūsts saspiests gaiss. Šajā gadījumā gaisa lifts līdzsvaro objekta masu, un tas peld gaisā.
Jaunākā šobrīd zinātnei zināmā metode ir levitācija, izmantojot akustiskos viļņus.

Kādi ir daži magnētiskās levitācijas piemēri?
Zinātniskās fantastikas rakstnieki sapņoja par pārnēsājamām ierīcēm mugursomas lielumā, kas ar ievērojamu ātrumu varētu “levitēt” cilvēku viņam vajadzīgajā virzienā. Zinātne līdz šim gājusi citu ceļu, praktiskāku un realizējamāku – tika izveidots vilciens, kas pārvietojas, izmantojot magnētisko levitāciju.
Supervilcienu vēsture
Ideju par kompozīciju, izmantojot lineāro motoru, pirmo reizi ierosināja (un pat patentēja) vācu inženieris-izgudrotājs Alfrēds Zeins. Un tas notika 1902. gadā. Pēc tam ar apskaužamu regularitāti parādījās elektromagnētiskās balstiekārtas un ar to aprīkota vilciena izstrāde: 1906. gadā Franklins Skots Smits ierosināja citu prototipu laikposmā no 1937. līdz 1941. gadam. Hermans Kempers saņēma vairākus patentus par šo pašu tēmu, un nedaudz vēlāk brits Ēriks Lazevaits izveidoja strādājošu pilna izmēra dzinēja prototipu. 60. gados piedalījies arī Tracked Hovercraft izstrādē, kam vajadzēja kļūt par visvairāk, taču tā arī nekļuva, jo nepietiekamā finansējuma dēļ projekts tika slēgts 1973. gadā.
Tikai sešus gadus vēlāk atkal Vācijā tika uzbūvēts magnētiskās levitācijas vilciens, kas tika licencēts pasažieru pārvadāšanai. Hamburgā ieklātā testa trase bija nepilnu kilometru gara, taču pati ideja tik ļoti iedvesmoja sabiedrību, ka vilciens darbojās arī pēc izstādes slēgšanas, trīs mēnešu laikā paspējot nogādāt 50 tūkstošus cilvēku. Tā ātrums pēc mūsdienu standartiem nebija tik liels – tikai 75 km/h.
Kopš 1984. gada starp Birmingemas lidostu un dzelzceļa staciju kursēja nevis ekspozīcija, bet gan komerciāls maglevs (kā tika saukts ar magnētu darbināmais vilciens) un darbojās 11 gadus. Trases garums bija vēl īsāks, tikai 600 m, un vilciens pacēlās 1,5 cm virs sliežu ceļa.

Japāņu versija
Pēc tam satraukums par magnētiskās levitācijas vilcieniem Eiropā norima. Bet 90. gadu beigās par tiem aktīvi sāka interesēties tāda augsto tehnoloģiju valsts kā Japāna. Tās teritorijā jau ir izveidoti vairāki diezgan gari maršruti, pa kuriem lido maglevs, izmantojot tādu parādību kā magnētiskā levitācija. Tai pašai valstij pieder arī šo vilcienu uzstādītie ātruma rekordi. Pēdējais no tiem uzrādīja ātruma ierobežojumu vairāk nekā 550 km/h.
Turpmākas izmantošanas perspektīvas
No vienas puses, maglevs ir pievilcīgs ar savām ātrās kustības iespējām: pēc teorētiķu domām, tuvākajā nākotnē tos var paātrināt līdz 1000 kilometriem stundā. Galu galā tos virza magnētiskā levitācija, un tos tikai palēnina gaisa pretestība. Tāpēc, piešķirot kompozīcijai pēc iespējas aerodinamiskākās kontūras, tā ietekme ievērojami samazinās. Turklāt, ņemot vērā to, ka tie nepieskaras sliedēm, šādu vilcienu nodilums ir ārkārtīgi lēns, kas ir ļoti ekonomiski izdevīgi.
Vēl viens pluss ir trokšņa efekta samazināšana: maglevs pārvietojas gandrīz klusi, salīdzinot ar parastajiem vilcieniem. Bonuss ir arī elektrības izmantošana tajos, kas samazina kaitīgo ietekmi uz dabu un atmosfēru. Turklāt tas spēj pārvarēt stāvākas nogāzes, kas novērš nepieciešamību ierīkot dzelzceļa sliedes ap kalniem un nogāzēm.
Enerģijas lietojumi
Tikpat interesantu praktisko virzienu var uzskatīt par magnētisko gultņu plašo izmantošanu galveno mehānismu komponentos. To uzstādīšana atrisina nopietno izejmateriāla nodiluma problēmu.
Kā zināms, klasiskie gultņi diezgan ātri nolietojas – tie pastāvīgi piedzīvo lielas mehāniskās slodzes. Dažās jomās nepieciešamība nomainīt šīs daļas nozīmē ne tikai papildu izdevumus, bet arī lielu risku cilvēkiem, kas apkalpo mašīnu. darbojas daudzas reizes ilgāk, tāpēc to lietošana ir ļoti ieteicama jebkuros ekstremālos apstākļos. Jo īpaši kodolenerģijā, vēja tehnoloģijās vai nozarēs, ko pavada ārkārtīgi zema/augsta temperatūra.

Lidmašīnas
Magnētiskās levitācijas ieviešanas problēma liek uzdot pamatotu jautājumu: kad beidzot tiks ražots un prezentēts progresīvajai cilvēcei pilnvērtīgs lidaparāts, kurā tiks izmantota magnētiskā levitācija? Galu galā ir netieši pierādījumi, ka šādi “NLO” pastāvēja. Ņemsim, piemēram, senāko laikmetu indiešu “vimanas” vai Hitlera “disku lidmašīnas”, kas mums ir tuvākas laikā, cita starpā izmantojot elektromagnētiskās pacelšanas spēka organizēšanas metodes. Saglabājušies aptuveni darba modeļu rasējumi un pat fotogrāfijas. Jautājums paliek atklāts: kā visas šīs idejas īstenot dzīvē? Taču mūsdienu izgudrotāji vēl nav tikuši tālāk par ne pārāk dzīvotspējīgajiem prototipiem. Vai varbūt šī joprojām ir pārāk slepena informācija?
Šeit mēs stāstām un parādām, kā ar savām rokām pagatavot foršu Levitron!
Šo amatu biju spiesta samontēt universitātē :)
Pagatavoju kopā ar klasesbiedru, kuras uzdevums bija uztaisīt traku lietu, un man - elektroniskais pildījums.
Cik lieliski viss izdevās - spriediet paši, rakstiet komentārus, būs interesanti palasīt un apspriest.
Es precīzi neatceros, kā mums radās ideja par Levitrona izgatavošanu, amata tēma bija brīvā formā. Dizains šķiet vienkāršs, taču tas piesaista acis.
Kopumā Levitron pati par sevi ir ierīce, kas atbalsta jebkuru objektu vidē, kas nesaskaras ne ar vienu virsmu, izņemot caur gaisu. Tas darbosies arī vakuumā.
Šajā gadījumā elektronika liek magnētam peldēt, un magnētu jau var pielīmēt pie, piemēram, garšīga lēta dzēriena skārdenes :)
Ja rūpīgi meklējat internetā, jūs varat redzēt daudzas dažādas elektromagnētiskā Levitron versijas, piemēram:
Tos var iedalīt apturētajos un atgrūžos. Ja pirmajā gadījumā ir nepieciešams vienkārši kompensēt gravitācijas spēku, tad otrajā ir arī nobīde horizontālajā plaknē, jo saskaņā ar Ernšova teorēmu “jebkura punktveida lādiņu līdzsvara konfigurācija ir nestabila, ja nekas neiedarbojas tos, izņemot Kulona pievilkšanas un atgrūšanas spēkus. - citāts no wiki.
No tā izriet, ka piekaramo levitronu ir vieglāk izgatavot un konfigurēt, ja tas vispār ir nepieciešams. Negribēju pārāk apnikt, tāpēc universitātei uztaisīja piekaramo Levitronu, par ko šeit ir runa, un es jau uztaisīju sev atbaidošu savam mīļotajam :) Par to tiks rakstīts citā rakstā. Nedaudz vēlāk izdzēsīšu šo tekstu un sniegšu saiti uz to šeit. Tas darbojas lieliski, taču tam ir arī savas negatīvās puses.
Savukārt visus piekaramos levitronus var iedalīt arī digitālajos un analogajos atbilstoši objekta turēšanas metodei vienādā attālumā. Un pēc sensoru veida tos var iedalīt optiskajos, elektromagnētiskajos, skaņas un, iespējams, visās.
Tas ir, mēs saņemam analogo signālu par magnēta attālumu līdz Levitronam un digitāli regulējam magnēta ietekmes spēku. Tomēr augstās tehnoloģijas.
Pati ideja tika aizgūta no geektimes vietnes, un iespiedshēmas plate tika izgatavota personīgi mūsu detaļu komplektam. Arī oriģinālajā projektā tika izmantoti trīs termināļu SS49 sensori, taču termiņi bija ļoti saspringti, tie bija, maigi izsakoties, nepamatoti dārgi (4 USD par gabalu pret 6 USD par 10 gab. Ķīnā – saite piemēram), tāpēc mēs izmantoja četru terminālu Hall sensorus. Man bija jāmaina ķēde un jāveic ierīces strukturālie papildinājumi. Tāpat lielākai izrādīšanai tika pievienots gaismas diožu bloks, kas vienmērīgi iedegas, kad tiek pacelts magnēts, tas ir, kad Levitron sāk darboties un vienmērīgi izslēdzas, kad magnēts tiek noņemts. Tas viss tiks atspoguļots diagrammā.
Faktiski Levitron ķēde ar četru spaiļu sensoriem:

Un Levitron ķēde ar trīs spaiļu sensoriem un vienkāršāku fona apgaismojumu:

Darbības princips ir diezgan vienkāršs. Spole, kas ir elektromagnēts, kad tiek pielietota jauda, pievelk magnētu - objekts tiek piesaistīts. Sensors, kas piestiprināts starp magnētu un spoli, nosaka magnētiskās plūsmas palielināšanos, kas nozīmē, ka magnēts tuvojas. Elektronika to uzrauga un atvieno spoli no sprieguma avota. Magnēts sāk krist gravitācijas ietekmē. Sensors fiksē magnētiskās plūsmas samazināšanos, ko uzreiz konstatē elektronika un elektromagnētam tiek pielikts spriegums, magnēts tiek pievilkts – un tas notiek ļoti bieži – aptuveni 100 tūkstošus reižu sekundē. Rodas dinamisks līdzsvars. Cilvēka acij nav laika to pamanīt. Ģeneratora frekvenci iestata rezistors un kondensators uz TL494 mikroshēmas 5. un 6. tapām.
Otrs sensors elektromagnēta otrā pusē ir nepieciešams, lai kompensētu pašas spoles radīto magnētisko lauku. Tas ir, ja šis otrais sensors nepastāvētu, tad, kad elektromagnēts tika ieslēgts, sistēma nespētu atšķirt neodīma magnēta magnētiskā lauka intensitāti no paša elektromagnēta radītā magnētiskā lauka.
Tātad mums ir divu sensoru sistēma, no kuras signāls tiek padots uz darbības pastiprinātāju diferenciālā savienojumā. Tas nozīmē, ka darbības pastiprinātāja izejā parādās tikai no sensoriem saņemtā sprieguma starpība.
Piemēram. Vienam no sensoriem izejas spriegums ir 2,5 V, bet otram - 2,6 V. Izeja būs 0,1 V. Šis diferenciālais signāls atrodas LM324 mikroshēmas 14. tapā atbilstoši shēmai.
Pēc tam šis signāls tiek padots nākamajiem diviem darbības pastiprinātājiem - OP1.1, OP 1.3, kuru izejas signāli iet caur diodes vārstu uz TL494 mikroshēmas 4. tapu. Diodes vārsts uz diodēm D1, D2 izlaiž tikai vienu no spriegumiem - to, kas būs lielāks par nominālvērtību. PWM kontrollera tapa Nr.4 darbojas šādi - jo augstāks spriegums pie šīs tapas, jo mazāks impulsu darba cikls. Rezistors R9 ir konstruēts tā, ka situācijā, kad spriegums pie diodes vārsta ieejām ir mazāks par 0,6 V, tapa Nr. 4 ir skaidri novilkta uz zemi, savukārt PWM radīs maksimālo darba ciklu.
Atgriezīsimies pie operacionālajiem pastiprinātājiem OP1.1, OP 1.3. Pirmais kalpo, lai izslēgtu PWM kontrolieri, kamēr magnēts atrodas pietiekami lielā attālumā no sensora, lai spole nedarbotos maksimālā tukšgaitā.
Izmantojot OP 1.3, mēs iestatām diferenciālā signāla pastiprinājumu - būtībā tas nosaka atgriezeniskās saites dziļumu (Feedback). Jo spēcīgāka atgriezeniskā saite, jo spēcīgāk sistēma reaģēs uz magnēta tuvošanos. Ja OS dziļums nav pietiekams, magnētu var pietuvināt, un ierīce nesāks samazināt elektromagnētā iesūknēto jaudu. Un, ja operētājsistēmas dziļums ir pārāk liels, darba cikls sāks samazināties, pirms magnēta pievilcības spēks to spēs noturēt šajā attālumā.
Nav nepieciešams uzstādīt mainīgo rezistoru P3 - to izmanto ģeneratora frekvences regulēšanai.
OP1.2 ir 2,5 V sprieguma ģenerators, kas nepieciešams četru kontaktu sensoriem. Tas nav nepieciešams trīs kontaktu SS49 tipa sensoriem.
Es aizmirsu pieminēt elementus C1, R6 un R7. Viņu viltība ir tāda, ka pastāvīgais signāls šeit tiek samazināts 10 reizes rezistoru dēļ, un mainīgais signāls klusi iet tālāk kondensatora dēļ, tādējādi panākot ķēdes uzsvaru uz pēkšņām magnēta attāluma izmaiņām līdz sensoram.
Diode SD1 ir paredzēta reversās emisijas slāpēšanai, kad elektromagnēta spriegums ir izslēgts.
T2 mezgls ļauj vienmērīgi ieslēgt un izslēgt LED līniju, kad uz elektromagnēta parādās impulsi.
Pāriesim pie dizaina.
Viens no galvenajiem Levitron punktiem ir elektromagnēts. Izgatavojām rāmi pēc kaut kādas konstrukcijas skrūves, uz kuras tika izgrieztas apaļas saplākšņa malas.

Magnētiskā plūsma šeit ir atkarīga no vairākiem galvenajiem faktoriem:
- serdes klātbūtne;
- spoles ģeometrija;
- spoles strāva
Vienkārši sakot, jo lielāka ir spole un jo lielāka tajā plūst strāva, jo spēcīgāk tā piesaista magnētiskos materiālus.
Kā tinums tika izmantots PEL stieple 0,8 mm. Viņi to ripināja ar aci, līdz spoles izmērs šķita iespaidīgs. Rezultāts ir šāds:


Iespējams, ka mūsu apkārtnē vajadzīgo vadu nav iespējams atrast, bet interneta veikalos ir diezgan vienkārši - 0,4 mm vads spoles uztīšanai.

Kamēr spole tika uztīta, tāfele tika sagatavota un iegravēta. Tas tapis, izmantojot LUT tehnoloģiju, tāfeles rasējums tapis programmā Sprint LayOut. Levitron plati var lejupielādēt no saites.

Tāfele tika iegravēta amonija persulfāta paliekās, kuras tukša burka vēlāk veiksmīgi izmantota šajā projektā :)

Es vēlos atzīmēt, ka detaļu izvietojums, kā arī sliežu ceļu maršrutēšana nozīmē ļoti rūpīgu lodēšanu, jo savienojumus ir viegli izveidot tur, kur tiem nevajadzētu būt. Ja jums nav šādu prasmju, to ir pilnīgi iespējams izdarīt ar lieliem komponentiem uz maizes dēļa, piemēram, šī, un izveidot savienojumus, izmantojot vadus otrā pusē.
Rezultātā dēlis izrādījās šāds:


Plāksne ļoti ergonomiski iederējās spoles izmēros un tika piestiprināta tieši pie tā, izmantojot spēcīgu karstās kausēšanas līmi, tādējādi pārvēršoties par vienu monobloku - pievienojiet strāvu, konfigurējiet to, un sistēma darbojas.

Bet tas viss notika, pirms elektromagnēts bija gatavs. Plāksne tika izgatavota nedaudz agrāk un, lai kaut kā pārbaudītu ierīces funkcionalitāti, uz laiku tika pievienota mazāka spole. Pirmais rezultāts iepriecināja.


Sensori, kā jau rakstīts iepriekš, tiek izmantoti no BLDC motoru pozīcijas izsekošanas sistēmām, četru kontaktu. Tā kā dokumentāciju par tiem atrast nebija iespējams, nācās empīriski noskaidrot, kuras tapas par ko atbild. Formas faktors izrādījās:

Tikmēr ieradās liels elektromagnēts. Šī lieta man deva daudz cerību :)

Pirmie testi ar lielu elektromagnētu parādīja diezgan lielu darba attālumu. Šeit ir viena nianse - sensoram, kas atrodas neodīma magnēta sānos, jābūt nedaudz tālāk no spoles, lai nodrošinātu drošu elektronikas darbību.


Pēdējā fotogrāfija vairāk izskatās pēc kaut kāda kosmosa satelīta. Starp citu, tieši šādi varētu izveidot šo Levitronu. Un tiem, kas plāno atkārtot dizainu, viss ir priekšā :)

Kā levitējošu priekšmetu tika nolemts izmantot bezalkoholiskā dzēriena skārdeni. Mēs piestiprinām pie burkas magnētu, izmantojot abpusēju līmlenti, un pārbaudām to.

Tas darbojas lieliski, kopumā ierīci var uzskatīt par gatavu. Atliek tikai ārējais dizains. Atbalsta sija tika izgatavota no stieņiem un nūjām; mūsu monobloka korpuss tika izgatavots no tās pašas tukšās plastmasas amonija persulfāta kannas. No monobloka iziet tikai divi vadi strāvas padevei, kā paredzēts.

Līdz tam laikam jau bija pielodēta ķēde gaismas diožu līnijas vienmērīgai ieslēgšanai, montējot virs galvas, un pati līnija tika veiksmīgi uzmontēta uz visuresošās karstās kausēšanas līmes.
Barošanas bloks ir no kāda printera aizgūta iekārta, kas pārveidota no 42 V uz 12 V.
Parādīšu arī barošanas bloka izskatu :)

Tālāk no saplākšņa tika izgatavots statīvs, kurā tika ievietots barošanas bloks un savienotājs 220 V pieslēgšanai. Skaistumam augšpusē tika pielīmēts auduma audums, visa konstrukcija tika nokrāsota dzeltenā un melnā krāsā. Burka tika nomainīta, jo eksperimentu laikā tā nedaudz iespiedusies.





No tā visa, papildus levitācijas efektam, izrādījās ļoti brīnišķīga nakts gaisma.


Nedaudz vēlāk pievienošu video, bet pagaidām, visam visam, vēlos teikt, ka manu dizainu viegli atkārtoja kāds 13 gadus vecs students manā radio klubā.
Izskats vēl nav pabeigts, taču elektroniskie komponenti darbojas, kā paredzēts. Tās dizaina fotoattēls:


 Sienu pamatu drenāžas cena Materiāli un instrumenti
Sienu pamatu drenāžas cena Materiāli un instrumenti Attālums starp aku un tvertni: SanPiN un SNiP standarti Cesspool daudzdzīvokļu mājā
Attālums starp aku un tvertni: SanPiN un SNiP standarti Cesspool daudzdzīvokļu mājā Veļas mašīnas uzstādīšana un pieslēgšana ūdensvadam
Veļas mašīnas uzstādīšana un pieslēgšana ūdensvadam Ledusskapja termostata regulēšana ar savām rokām Pašdarināts termostats ledusskapim, izmantojot atsevišķus elementus
Ledusskapja termostata regulēšana ar savām rokām Pašdarināts termostats ledusskapim, izmantojot atsevišķus elementus Bārbekjū - kūpinātava "dari pats" no gāzes baloniem "dari pats" kūpinātava no propāna balona
Bārbekjū - kūpinātava "dari pats" no gāzes baloniem "dari pats" kūpinātava no propāna balona DIY bērnu velomobilis - detalizēts apraksts un diagramma
DIY bērnu velomobilis - detalizēts apraksts un diagramma Vara stiepļu metināšanas metodes Vara vadu punktmetināšana
Vara stiepļu metināšanas metodes Vara vadu punktmetināšana